主要内容
pcmerge
合并两个三维点云
描述
ptCloudOut= pcmerge (ptCloudA,ptCloudB,gridStep)gridStep指定过滤器的3-D框的大小。
例子
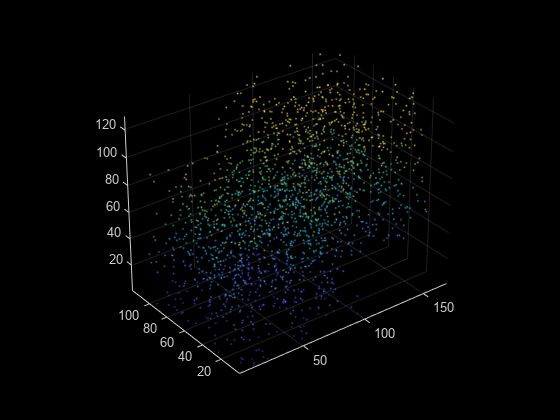
合并两个相同的点云使用框网格过滤器
创建一个点云与X, Y, Z点在[0,100]。
ptCloudA = pointCloud(100 *兰特(1000 3));
创建一个部分重叠的点云。
ptCloudB = pointCloud([70 20 30] + 100*rand(1000,3));
合并两个点云使用框过滤器。
ptCloudOut = pcmerge(ptCloudA, ptCloudB, 1);pcshow (ptCloudOut);
输入参数
输出参数
提示
如果两个点云没有填充相同的属性集,例如
颜色或正常的,这些属性将在返回的点云中被清除。例如,如果ptCloudA颜色,但ptCloudB不,那么ptCloudOut不含颜色。函数过滤出带有的点
南或正值。
扩展功能
另请参阅
对象
功能
pcplayer|pcshow|pcwrite|pcread|pctransform|pcdownsample|pcfitplane|pcdenoise|pcregistericp|pccat|pcalign
主题
介绍了R2015a
你也可以从以下列表中选择一个网站:
