 克莱夫之角:克莱夫·莫勒谈数学与计算
克莱夫之角:克莱夫·莫勒谈数学与计算 MATLAB博客
MATLAB博客 史蒂夫的图像处理与MATLAB
史蒂夫的图像处理与MATLAB Simulin金宝appk上的家伙
Simulin金宝appk上的家伙 人工智能
人工智能 开发区域
开发区域 Stuart的MATLAB视频
Stuart的MATLAB视频 头条背后
头条背后 文件交换选择的一周
文件交换选择的一周 汉斯谈物联网
汉斯谈物联网 学生休息室
学生休息室 MATLAB社区
MATLAB社区 Matlab
Matlab 创业公司、加速器和企业家
创业公司、加速器和企业家 自治系统
自治系统
SAE 2级自动化的原型感知系统
今天的特邀嘉宾是大卫·巴恩斯。David是MathWorks的毕业生实习生,他也是阿拉巴马大学(UA) EcoCAR移动挑战赛团队。UA团队完成了3理查德·道金斯总的来说,在北美的12所大学中第一年比赛在乔治亚州的亚特兰大举行。David通过提供UA设计的例子,描述了EcoCAR移动挑战赛团队如何为他们的自动化功能奠定基础。可以找到许多示例的代码在这里的MATLAB中央文件交换。
- - - - - -
通过基于模型的设计接近汽车系统
大学第一年汽车出行挑战竞赛展示了团队为新兴的移动即服务(MaaS)市场重新设计2019款雪佛兰Blazer的作品。查看更多关于四年比赛的信息这篇博文。EcoCAR团队正在追击SAE 2级自动功能,能够通过自适应巡航控制(ACC)纵向和有限的横向控制车辆。EcoCAR团队正在研究联网和自动驾驶汽车(CAV)技术以及车联网(V2X)通信系统对能源消耗的影响。
EcoCAR团队使用基于模型的设计有效地迭代和改进CAV系统设计。第一年的CAV活动集中在车辆纵向控制所需的初始子系统上。这些系统是ACC、传感器硬件和传感器融合算法,其系统级交互如下图所示:

图:UA CAV系统概述
可视化和模拟传感器,以最大限度地检测
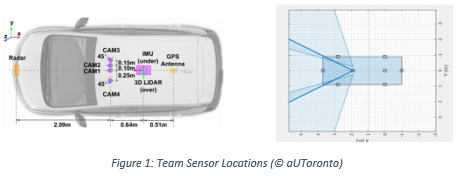
使用驾驶场景设计师, EcoCAR团队在基于组件规格表的模拟环境中创建传感器,团队使用鸟瞰图(BEP)可视化传感器覆盖范围。EcoCAR移动挑战赛由英特尔赞助,英特尔提供了一个Mobileye 6系列系统每支队伍。Mobileye使用车载处理器,使视觉系统能够识别行人、骑自行车的人、车辆、道路标志和车道标记。在白天,系统可以探测到自我车辆(被控制的车辆)150米范围内的目标车辆(感兴趣的车辆)784水平视场Mobileye的全部限制如下图所示:

博世,另一个EcoCAR移动挑战赛的赞助商,提供了两种类型的雷达单元中程雷达(MRR)传感器阵容。这些是双静态、多模态雷达,通过改变不同探测距离的水平视场角度来扫描物体。MRR雷达视场从20°到12°变化,以探测自我车辆前方160米的目标车辆。MRR雷达上的仰角天线可以确定自我车辆前方36米的物体高度。另一种雷达选择,MRR后置雷达,最大工作距离为70米,近距估计为12米,水平视场为150°。下面用bep描述了这两个雷达的全部限制。

图:博世MRR雷达和MRR后雷达视场
尽管使用驾驶场景设计器在2D中显示检测结果,但这些传感器在垂直视场下运行时是3D模拟的。垂直视场辅助探测,当自我车辆上下山坡时,目标车辆可能会被丢弃,或者立交桥可能被识别为自我车辆路径上的静止物体。
团队研究了不同的传感器布局使用MATLAB脚本为如下所示的潜在配置快速生成bep:

图:电位传感器布局
传感器布局尺寸雪佛兰Blazer然后在模拟的道路上进行测试,将道路和其他车辆添加到环境中。这些模拟允许团队衡量传感器布局的有效性,UA团队使用误差百分比公式评估布局的模拟:
![]()
UA团队创建了几个场景,首先是检测进入自我车辆车道的目标车辆。其他模拟测试了感知系统在倾斜和盲目转弯中探测目标车辆的极限。这些模拟结果的一个例子可以在下面的GIF中看到:
图:倾斜转弯仿真结果
理解感知系统的局限性
在分析了不同可能的布局后,UA选择了如下图所示的布局,盲点用红色表示:

图:UA有盲点的传感器布局
UA的布局是在车辆挡风玻璃的内部使用Mobileye,在前面板的中间使用一个MRR雷达。四个MRR后雷达将定位在车辆的四个角落,以45°向外。在这种布局中,对直接跟随在开拓者后面的车辆的探测被限制在自我车辆后面最多30米的范围内。
UA计划让Blazer根据驾驶员的要求变道,因此CAV系统必须确认两侧盲点内没有物体。UA调查了两种极端情况,一种是摩托车,另一种是目前最小的量产车a精灵。如下图所示,Smart Fortwo(黄色)总是可以被检测到,但摩托车(紫色)可以不被检测到:

图:摩托车和Smart Fortwo在侧面盲区
传感器融合从多个传感器输入创建一个自我车辆周围环境的凝聚力图片。传感器融合可以跟踪物体,比如摩托车,即使物体处于车辆的盲区。这些重要的信息可以帮助减轻潜在的问题,并帮助ACC控制器做出决定,以满足驾驶员的变道请求。
传感器融合算法可以在MATLAB或Sim金宝appulink,在那里,许多物体都可以使用卡尔曼滤波器在一个全局最近邻算法。该数据流如下所示:
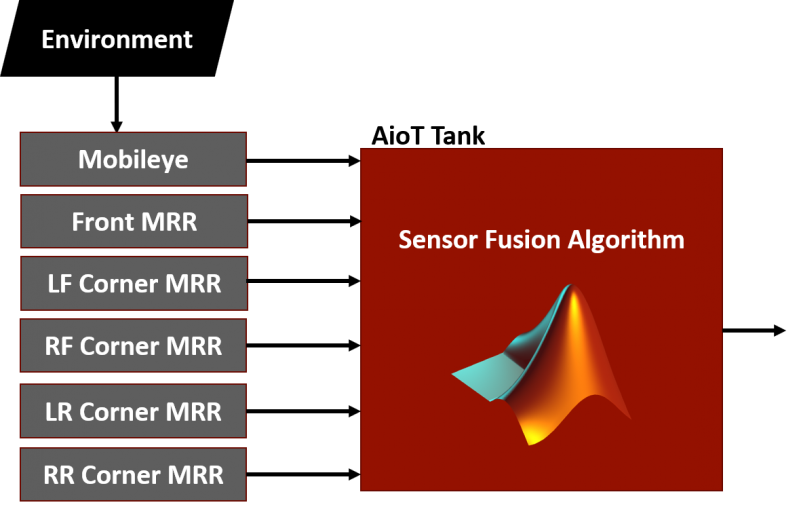
图:通过CAV系统的数据流
使用驱动场景设计器,UA团队使用来自模拟场景的数据实现算法。下面的GIF显示了一个简单的传感器融合模拟,它通过侧面盲点跟踪一辆摩托车:
图:利用传感器融合追踪一辆摩托车通过侧面盲区
使用骡车验证模拟的测试组件
EcoCAR团队从英特尔和博世获得硬件,用于在台式测试和骡车(用于测试目的的车辆)中实现传感器。UA使用了之前AVTC的2016款雪佛兰科迈罗EcoCAR3作为CAV的骡子车。Mobileye安装在挡风玻璃上,雷达安装在前筋膜的外部,使用如下所示的吸力支架。

图:UA的骡子车传感器安装
Mobileye需要车辆信息来执行车载图像处理,这些信息通过OBDII端口提供给Mobileye。Mobileye只提供数据流,不传输视频,所以UA安装了一个捐赠的英特尔芯片RealSense相机捕捉视频片段的数据验证和可视化。

图:Mobileye和RealSense摄像头安装
UA的骡子车在阿拉巴马州的塔斯卡卢萨附近行驶,收集数据用于分析向量的硬件他是EcoCAR移动挑战赛的赞助商。UA使用了独木舟从移动眼记录数据的系统。然后将原始数据导出为.mat文件,并使用MATLAB函数在BEP上显示plotDetection。Mobileye的数据并不完美,如下图所示,与RealSense摄像头的视频相比,有一些无关的检测:
图:从收集的数据中可视化测试结果
使用骡子车,UA团队从收集的Mobileye数据中测试传感器融合算法。本文测试了一种使用单个传感器的传感器融合算法中的车辆跟踪。下面的GIF显示了自我车辆接近停止的目标车辆时的原始检测数据:
![]()
图:从Mobileye收集的数据
下图显示了经过传感器融合处理后的目标车辆的跟踪情况,提供了过滤后的跟踪历史和航向矢量的视觉效果:
![]()
图:单传感器车辆跟踪
未来的工作
UA的感知系统将通过增加多个传感器来开发卡尔曼滤波增加了精度与多个传感器通过单个传感器系统。所开发的传感器融合算法将在仿真环境中使用,并利用收集到的数据跟踪传感器视场内的目标并通过盲点。UA团队将使用英特尔TANK AIoT部署传感器融合算法来处理数据流ROS节点来自机器人系统工具箱的MATLAB/Simulink金宝app。处理后的数据将由开发的团队使用ACC控制器向推进和转向系统发送正确的指令。
结论
EcoCAR团队测试了传感器布局和传感器融合算法,包括单独测试和集成测试。通过基于数据的决策,EcoCAR团队将继续开发SAE 2级自动功能,并通过道路测试进行进一步的模拟和验证。
现在轮到你了!
你是如何使用MATLAB和Simulink开发自动化系统的金宝app?你是否成功地使用多传感器感知系统来控制车辆、机器人或其他系统?
联系任何一个12大学如果您有兴趣参与该计划或赞助团队关于未来移动出行的工作!此外,您还可以在社交媒体上关注EcoCAR移动挑战:脸谱网,推特,Instagram,YouTube,LinkedIn





コメント
コメントを残すには,ここをクリックしてMathWorksアカウントにサインインするか新しいMathWorksアカウントを作成します。