MATLAB和Simu金宝applink
对于机器人
将您的机器人思想和概念转换为在现实环境中无缝工作的自主系统。

机器人技术研究人员和工程师使用MATLAB和Simulink设计和优化算法,模型真实世界的系统,并自金宝app动生成代码 - 都来自同一个软件环境。
随着MATLAB和Simulin金宝appk,您可以:
- 连接并控制你的机器人与你的算法开发。
- 开发hardware-agnostic算法并连接到机器人操作系统-都ROS和ROS2。
- 连接到一个范围传感器和执行器的因此,您可以发送控制信号或分析多种类型的数据。
- 消除手动通过自动生成的代码对于像微控制器嵌入式目标,FPGA中,PLC和GPU的在许多语言如C / C ++,VHDL / Verilog的,结构化文本,和CUDA。
- 连接到Arduino和Raspberry Pi等低成本硬件使用预构建的硬件支持包。金宝app
- 简化设计评审通过创建可共享代码和应用程序。
- 与旧代码工作与现有的机器人系统集成。
看一个机器人例子

使用MATLAB和Simulink简化机器人和地面车辆路径规划和导航的复杂任务。金宝app这个演示演示了如何仅使用三个组件来模拟一个自主机器人:路径、车辆模型和路径跟随算法。
跟着:







规划和决策
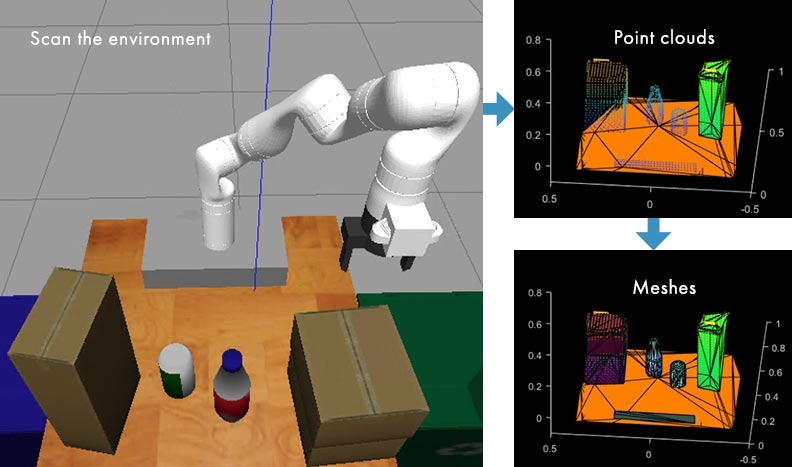
创建地图经由使用激光雷达传感器数据的环境的同步定位和绘图(SLAM)。
通过设计算法导航受约束的环境路径和运动规划。使用路径规划器计算任意给定映射中的无障碍路径。
设计算法,让你的机器人做出决策时面临的不确定性和在协同环境下进行安全操作。实现状态机定义决策所需的条件和行动。




“有了MATLAB和Simulin金宝appk,我们可以使用单一环境进行控制算法开发、调试、数据分析等,而不是在多个工具之间切换。这种集成减少了整个项目开发时间和引入错误的机会。”
约翰·温博士,伦斯勒理工学院




启动并运行MathWorks咨询服务
无论您的团队是刚起步,还是您是MATLAB和Simulink的资深用户,MathWorks咨询服务都可以与您一起开发定制的计划并加速项目开发金宝app。通过个性化的指导和完全透明的方法,我们的目标是让您控制改进的流程、工具和设计工作。

获取免费试用
30天唾手可得的探索。

有问题吗?
跟一个机器人专家。
