在恩智浦半导体,我和我的团队开发了一种验证汽车雷达集成电路(IC)设计的新方法。这左转方法与虚拟现场试验相结合了早期验证数据表级度量。通过专注于规范级别而不是硬件实现级别的指标,我们确保我们使用的验证签名标准与我们的客户进行评估,这些标准对我们的客户最感兴趣。并且,通过在虚拟现场试验中模拟路线场景,我们为雷达IC硬件实现循环环境验证,具有现实的测试刺激。
我们的客户包括许多Tier 1汽车供应商,最为兴趣的数据表上捕获的性能指标,例如信噪比(SNR)和总谐波失真(THD)。它们对单个组件测试结果,代码覆盖结果和硬件实施级别的其他指标不太感兴趣,尽管这些结果是大多数IC验证团队的主要关注点。此外,我们的客户使用现场试验和现实世界的驾驶场景来评估完整的雷达系统,而IC验证团队经常使用远离真实信号的测试模式来评估单独的RF,模拟和数字组件(图1)。
我和我的团队定义并实施的左倾方法使我们用来验证IC设计的过程与客户用来评估它们的标准保持一致。行车驾驶场景我们开发了虚拟实地试验是基于欧洲新车评估项目(欧洲五星)标准,我们的许多客户,和我们生产功能和性能指标(例如,信噪比)是相同的规格,我们的客户使用评估集成电路组件在他们自己的产品。下载188bet金宝搏

图1所示。显示射频、模拟和数字子系统的汽车雷达系统架构。
数据表级度量的早期验证
在过去验证汽车雷达系统的数字部分时,我的团队采用了一种基于通用验证方法(UVM)的方法。这种方法涉及通过以高级语言创建的参考模型来复制测试(DUT)的功能。然后将DUT的输出与给定输入测试向量的参考模型的输出进行比较。UVM测试没有捕获SNR测量和我们的客户对我们的客户感兴趣的其他指标,甚至相对较小的实现更改,例如更新有限脉冲响应(FIR)过滤器的系数,所以需要对测试禁止的相应变化。与实施同步保持测试台需要相当大的努力和时间。
鉴于这种方法的缺点和限制,我们决定将我们的验证努力集中在我们设计的功能和性能上,而不是在实现和参考模型之间的一对一等价。现在,我们开发matlab®该算法计算高水平的设计指标,如信噪比、THD和功率谱密度(PSD),以及滤波器和其他组件的指标,如阻带衰减和通带纹波。使用HDL Verifier™,我们从这些MATLAB算法中生成SystemVerilog DPI组件,并将它们集成到Cadence的HDL测试台上®仿真环境(图2)。

图2.使用MATLAB验证函数的测试环境,通过DPI-C在SystemVerilog包装器中实现,具有HDL验证器。
从DUT收集示例信号数据并传递给从我们的MATLAB验证码生成的DPI-C函数。我们绘制结果(图3)并检查它们以防止系统要求,以确保设计与规格匹配。
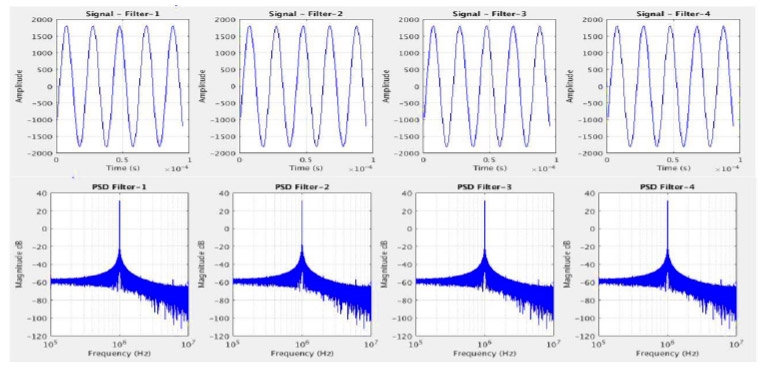
图3.使用MATLAB计算的样本信号(顶部)和功率谱密度图(下面)。
使用MATLAB生成的DPI-C模型使我们能够在Cadence HDL验证环境中的多个接口上计算功能和性能指标。我们可以将设计实现从验证中分离出来,并在一个抽象级别上进行测试,这个抽象级别与我们的客户感兴趣的指标更接近。
我们还可以重用MATLAB生成的C代码来分析初始硅测试的结果。例如,我们从雷达传感器IC中收集样本数据,并将其通过MATLAB生成的信噪比计算C函数,我们使用该函数在SystemVerilog中验证我们的设计。
虚拟现场试验
在向参数驱动验证方法的转变中,我们使用来自真实驾驶场景的数据进行虚拟现场试验。在过去,我们分别验证射频、模拟和数字子系统,为每个子系统使用不同的测试向量集。这些测试矢量很少来自道路测试中获得的雷达反射。
我们扩展了我们的方法,包括environment-in-the-loop验证。现在,我们使用自动驾驶工具箱™中的driving Scenario Designer应用程序构建驾驶场景(图4)。应用程序中的预构建场景代表了Euro NCAP测试协议,这是客户评估雷达系统性能的基准。

图4.在自动化驾驶工具箱中驱动方案设计器应用程序。
接下来,我们使用相控阵工具箱™构建雷达传感器模型。为了使这个模型与我们实际传感器的数据表规格相匹配,我们调整了天线孔径、峰值发射功率、接收机噪声数字和天线元件数量的参数。我们还调整了影响调频连续波(FMCW)波形的参数,包括最大范围、啁啾持续时间、扫描带宽和采样率。我们将传感器模型集成到前面创建的驾驶场景中,虚拟地将雷达传感器安装在ego车辆上(图5)。
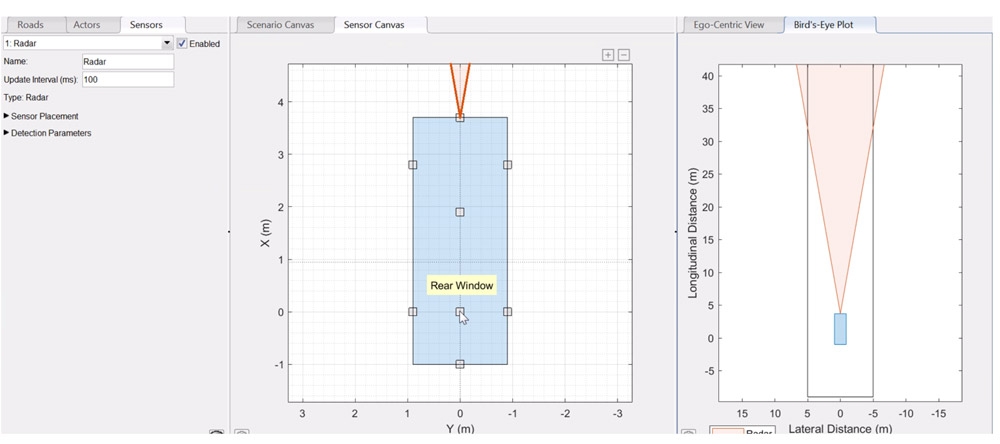
图5.用于管理雷达传感器在自助车辆上放置的接口。
然后我们执行驾驶场景并捕捉传感器的混频器输出,这是一个从场景中物体的雷达反射中解码的信号。我们把解码后的信号通过Simulink传输金宝app®模型的ADC设计,以产生数字智商数据,我们将这些数据输入我们的数字基带处理链。
使用此设置,我们可以基于欧元NCAP驱动方案生成IQ数据,并在第一个硅之前,在开发阶段的早期潜在地进行我们的数字加工链的虚拟现场试验(图6)。

图6。从虚拟现场试验中追逐相机视图(左上角)和鼠标绘图(右)。
未来的工作
我们已经将我们对新方法和工作流程的使用扩展到下一代雷达收发机。对于这些产品,我们将下载188bet金宝搏把环境影响纳入到我们的场景中,这样我们就可以看到设计在下雨或有雾时的表现。
识别出没有任何限制这一新的验证方法到汽车雷达系统的数字组件,我们期待将虚拟现场试验应用于模拟组件以及其他应用,例如汽车通信系统。本文集中在验证传感器实现的数字部分,但是可以轻松扩展这种环境的循环方法以验证混合信号和RF设计,如传感器设计中的ADC。
非常感谢我的NXP Semi团队成员Kaushik Vasanth实施了我们的环境在循环验证方法,并感谢MathWorks的Vidya Viswanathan提供了及时的技术支持。金宝app