Lidar Processing
Velodyne®file import, segmentation, downsampling, transformations, visualization, and 3-D point cloud registration from lidar
Advanced driver assistance systems use 3-D point clouds obtained from lidar scans to measure physical surfaces. Lidar point cloud processing enables you to downsample, denoise, and transform these point clouds before registering them or segmenting them into clusters. You can also read, write, store, display, and compare point clouds, including point clouds imported from Velodyne packet capture (PCAP) files.
Functions
Topics
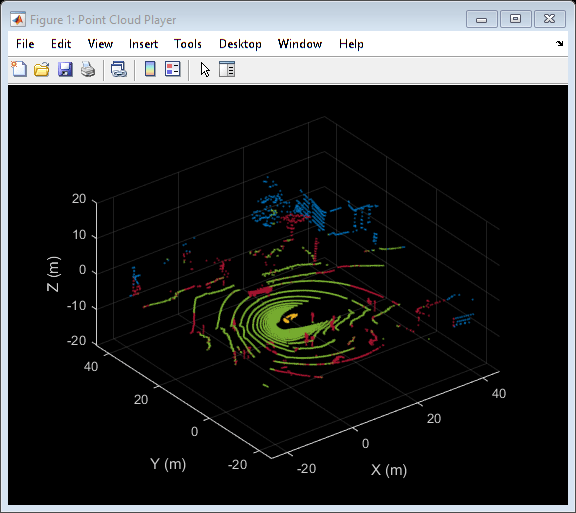
- Detect, Classify, and Track Vehicles Using Lidar(Lidar Toolbox)
This example shows how to detect, classify, and track vehicles by using lidar point cloud data captured by a lidar sensor mounted on an ego vehicle.
Featured Examples
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)