纵向控制器斯坦利
库:
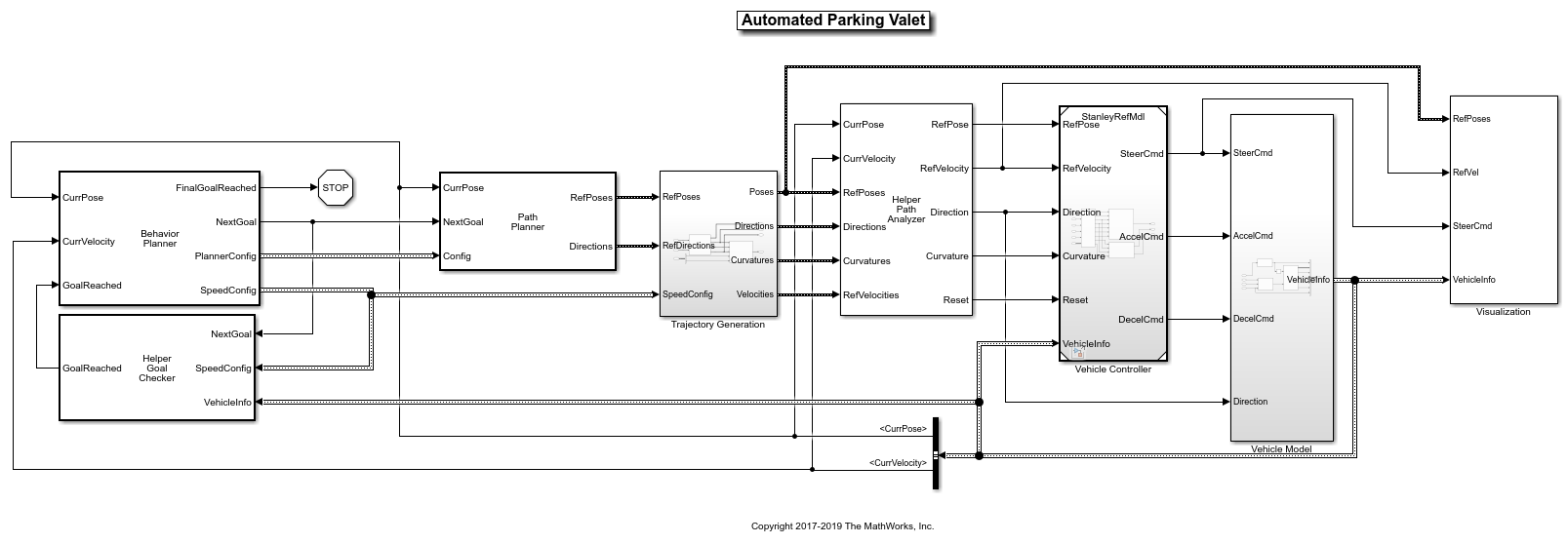
自动驾驶的工具箱/车辆控制
描述
的纵向控制器斯坦利块计算加速和减速命令,在米每秒,控制车辆的速度。指定参考速度,当前的速度,和当前的行驶方向。控制器使用Stanley)方法计算这些命令[1]块实现了,这是一个离散的比例积分(PI)控制器与anti-windup积分。更多细节,请参阅算法。
你也可以计算出车辆的转向角命令使用Stanley)方法。看到横向控制器斯坦利块。

港口
输入
输出
参数
算法
的纵向控制器斯坦利块实现了一个离散的比例积分(PI)控制器和积分anti-windup,所描述的Anti-windup方法(金宝app模型)PID控制器的参数。块使用这个方程:
u(k)的控制信号k时间步长。
Kp比例增益,设定的比例增益,Kp参数。
K我积分增益,设定的吗积分增益,吻参数。
T年代是样本块的时间秒,设定的吗样品时间(年代)参数。
e(k)是速度误差(CurrVelocity- - - - - -RefVelocity)k时间步长。为每一个k的区别,这个错误等于当前输入速度和参考速度(CurrVelocity- - - - - -RefVelocity)。
控制信号,u加速度的值,确定命令AccelCmd和减速命令DecelCmd。块浸透的加速和减速命令各自的范围(0,米一个]和[0,米D),地点:
米一个是价值的最大纵向加速度(m / s ^ 2)参数。
米D的价值吗最大纵向减速(m / s ^ 2)参数。
在每个时间步,唯一的一个AccelCmd和DecelCmd端口值是积极的,另一个端口值0。换句话说,车辆可以在一个时间步长加速或减速,但不能做一次。
运动的方向,如中指定方向输入端口,确定哪些命令是积极的在给定的时间步长。
| 方向端口值 | 控制信号值u(k) | AccelCmd端口值 | DecelCmd端口值 | 描述 |
|---|---|---|---|---|
1(移动) |
u(k)> 0 |
积极的真正的标量 | 0 |
车辆加速向前行驶 |
u(k)< 0 |
0 |
积极的真正的标量 | 车辆减速向前行驶 | |
1(反向运动) |
u(k)> 0 |
0 |
积极的真正的标量 | 车辆减速,因为它在反向传播 |
u(k)< 0 |
积极的真正的标量 | 0 |
汽车加速,因为它在反向传播 |
引用
[1]霍夫曼,加布里埃尔·M。Michael Montemerlo克莱尔·j·汤姆林,和Sebastian Thrun。“自主汽车越野驾驶轨迹跟踪:控制器设计、实验验证和赛车。”美国控制会议。2007年8月,页2296 - 2301。doi: 10.1109 / ACC.2007.4282788。
扩展功能
版本历史
介绍了R2019a