计算机视觉工具箱
Entwerfen UND TESTEN冯计算机视觉的,三维视觉的UND Videoverarbeitungssystemen
模具计算机视觉工具箱™bietet Algorithmen,Funktionen UND应用献给巢穴Entwurf UND测试冯计算机视觉的,三维视觉的UND Videoverarbeitungssystemen。SIEermöglichtObjekterkennung UND -verfolgung sowie Merkmalserkennung,-extraktion UND -abgleich。毛皮的3D视觉unterstützt模具工具箱模具Kalibrierung冯Einzel-,立体 - UND鱼眼Kameras;立体视觉;3D-Rekonstruktionen sowie死Verarbeitung冯激光雷达UND 3D-Punktwolken。计算机视觉应用automatisieren工作流程献给模具地面实况-Klassifikation UND死Kalibrierung冯Kameras。
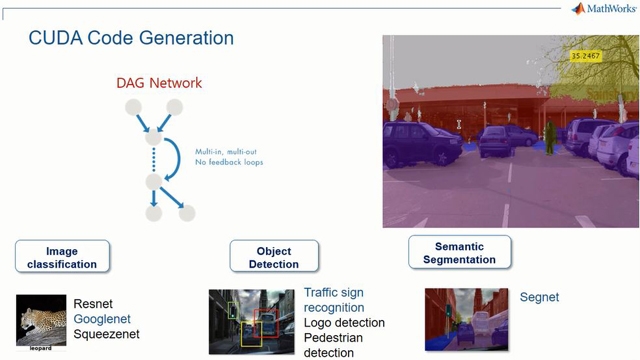
SIEkönnenbenutzerdefinierte Objektdetektoren mithilfe冯深Learning- UND机器学习,Algorithmen魏某YOLO V2,更快的R-CNN UND ACF trainieren。毛皮死semantische SegmentierungkönnenSIE深学习型Algorithmen魏某SegNet,U-Net的UND DeepLab verwenden。麻省理工学院vortrainierten ModellenkönnenSIE Gesichter,FußgängerUND ANDEREhäufigeObjekte erkennen。
SIEkönnenIHRE Algorithmen beschleunigen,indem SIE SIE奥夫Mehrkern-Prozessoren UND的GPUausführen。模具meisten Algorithmen德工具箱unterstützen模具C / C ++ - Codegenerierung献给死去集成MIT vorhandenem代码,模具桌面-Prototypenentwicklung UND模具Bereitstellung AUF嵌入式视觉Systemen。
检查现在Loslegen:

Objekterfassung UND -erkennung
Nutzen SIE框架的Zum Trainieren,Bewerten UND Bereitstellen冯Objektdetektoren魏某YOLO V2,更快的R-CNN,ACF UND维奥拉 - 琼斯。模具的视觉关键词UND OCR的Objekterkennungsfunktionen umfassen袋。Vortrainierte Modelle erkennen Gesichter,FußgängerUND ANDEREhäufigeObjekte。


Objekterfassung麻省理工学院更快R-CNN。
Semantische Segmentierung
Segmentieren SIE BILDER UND 3D-Volumen,indem SIE einzelne像素UND体素MIT Netzen魏某SegNet,FCN,U-Net的UND DeepLab V3 + klassifizieren。

地面实况的注释
Automatisieren SIE模具注释献给死去Objekterkennung,死semantische Segmentierung UND模具Szenenklassifikation MIT书房应用视频贴标UND图片标注。

地面实况 - 译注麻省理工学院DER视频贴标机应用程序内。
激光雷达UND Punktwolken-E / A
SIEkönnenPunktwolken AUS Dateien,冯激光雷达UND冯RGB-d-Sensoren lesen,schreiben UND anzeigen。
Registrierung冯Punktwolken
Registrieren SIE 3D-MIT Punktwolken书房Algorithmen正常的发行变换(NDT),迭代最近点(ICP)UND相干点漂移(CPD)。

Registrierung UNDZusammenfügungeiner Reihe街上冯Punktwolken。
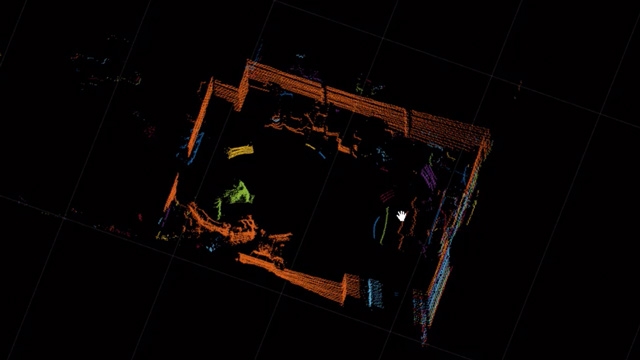
Segmentierung UND Formanpassung
Segmentieren SIE Punktwolken祖Clustern UND passen SIE geometrische福曼的Punktwolken的。Segmentieren SIE死Bodenfläche在激光雷达回到名单Daten献给Anwendungen IM automatisierten Fahren UND在德Robotik。

Segmentierte激光雷达Punktwolke。
Kalibrierung einer Einzelkamera
Automatisieren SIE死Schachbretterkennung UND kalibrieren SIE Loch- UND鱼眼Kameras麻省理工学院DER相机校准应用程序内。
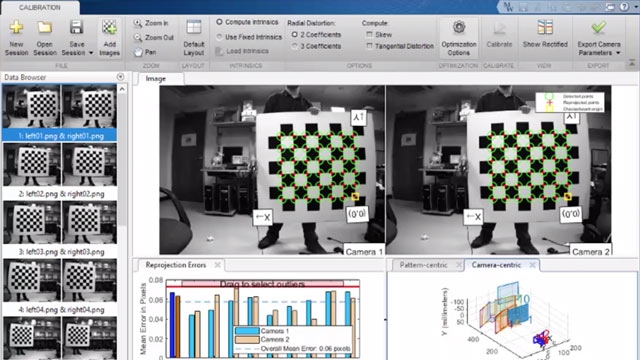
Kalibrierung einer Stereokamera
Kalibrieren SIE EIN Stereopaar,嗯死Tiefe祖berechnen UND 3D-Szenen祖rekonstruieren。

立体相机校准应用程序内。
3D立体幻镜
Ermitteln SIE Strukturen anhand冯Bewegung UND visueller Odometrie。

Struktur AUS Bewegung在mehreren Ansichten。
立体视觉
SchätzenSIE死Tiefe UND rekonstruieren SIE EINE 3D-Szene mithilfe EINES Stereokamerapaars。

立体声Disparitätskarte楚Darstellung relativer Tiefen。
Merkmalserkennung,-extraktion UND -abgleich
SIEkönneninteressante Merkmale,魏某Flächen,Kanten UND Ecken,尤伯杯mehrere BILDER hinweg erkennen,extrahieren UND abgleichen。

Erkennung EINES Objekts在einerüberladenenSzene mithilfe冯Punktmerkmalerkennung,-extraktion UND -abgleich。
Merkmalsbasierte Bildregistrierung
SIEkönnenMerkmale尤伯杯mehrere BILDER hinweg abgleichen,嗯geometrische Transformationen zwischen Bildern祖schätzenUND Bildsequenzen祖registrieren。

Mithilfe DER merkmalbasierten Registrierung erstelltes全景。
OBJEKT-跟踪
Verfolgen SIE在Videosequenzen OBJEKT-Bewegungsbahnen冯祖帧帧。

Spuren zeigen Bewegungsbahnen verfolgter Objekte的。
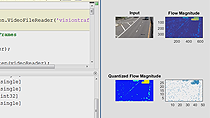
Bewegungsschätzung
SchätzenSIE Bewegungen zwischen视频帧mithilfe冯optischem Fluss女士,块匹配UND模板匹配。

Erkennung SICH bewegender Objekte麻省理工学院einerstationären佳美。
Codegenerierung
Generieren SIE C / C ++ - UND CUDA码sowie MEX-Funktionen献给Funktionen,克拉森,Systemobjekte UNDβ受体拮抗剂DER工具箱。
Punktwolken-深学习
Feststellen UND Klassifizieren冯Objekten在3D-Punktwolken
深度学习麻省理工学院großenBildern
Trainieren UND Nutzen冯深学习型Objektdetektoren UND Netzwerken楚semantischen Segmentierung贝sehrgroßenBildern
SLAM(同步定位和映射,gleichzeitige Ortung UND Kartenerstellung)
Ausführen冯Punktwolken- UND佳美-SLAM
条形码LESER
Erfassen UND Dekodieren冯1-D- UND 2-d-条码
SSD-Objekterfassung
Erfassen冯Objekten在Bildern麻省理工学院einem单发多光碟对象检测器(SSD)
详细祖Diesen表示Merkmalen UND书房zugehörigenFunktionen芬登SIE在书房Versionshinweisen。
