传感器融合和跟踪工具箱
多传感器跟踪与导航系统的仿真与试验

模具传感器融合和跟踪工具箱™UMFASST算法und ToolsFürIeNtenwicklung,模拟und Analyze von Systemen,Die Laten von Mehreren SenseenZusammenführen,UM情况Wahrnehmung und Lokalisation Aufrechtzuerhalten。Ausgangspune einen ousgangspunktfürentwicklung der Multi-objekt-verfolgung und sensmfusionfürüberwachungs-und自动体系systeme im luft-und weltraum,am boden,auf schiffen unter Wasser。
SieKönnenTenenAus Realen Sensoren,EinschließlichAktivemund Passivem Radar,Sonar,Lidar,EO / IR,IMU UND GPS / IMU-SensorenZusammenführen。Außerdemkönnensiesynthetische daten aus Virtuellen Senseen Generieren,Um Ihre算法在verschiedenen Szenarien Zu Testen。Die Toolbox UMFASST DAS跟踪Mehrerer Objekte undSchätzfilterZur Bewertung von Architekturen,Die Raster-,Erkennungs- und Objekt-Oter Tracking-SensorenZusammenführen。Zudem Sind Metriken Wie Ospa und GoSPa Zur Visalierung der Leistung Im Vergleich zu地面真相 - 斯坦肯焓。
Für die Beschleunigung der Simulation oder Rapid Prototyping unterstützt die Toolbox die Generierung von C Code。
Jetzt Beginnen:

Kostenloses白皮书
传感器融合与跟踪für自主系统
Luftraumuberwachung
用被动传感器雷达,ADS-B和EO/IR跟踪敌方目标。追踪器特征特性für die Verfolgung manövrierender对象。

追踪luftfahrzeeugen的踪迹。
Weltraumuberwachung
跟踪Mehrerer objekte im weltraum mittels radar-basierter senordaten,um situationsbewusstsein im weltraum zu erzeugen。Tracker-KonfigurierungFürieverwendungeines keplerschen bewegungsmodells oder Anderer OrbitalModelle。

跟踪vonweltraummüllmit keplerschen bewegungsmodellen。
Bodenüberwachung和海事Überwachung
扩展对象跟踪AM Boden Und在Maritimen Anwendungen MitHochauflösenden雷达 - und Lidar-Sensoren。

扩展目标跟踪mit激光雷达。
单一传感器跟踪
Modellieren und Simulieren Sie Das跟踪Mehrerer Objekte,Um Die在Intelligenten Sensoren Notwengige VerarbeitungAuszuführen。Das Beinhaltet AUCH模具转换von Rohdaten在奥比克弗尔格隆斯林。

利用激光雷达三维包围盒跟踪物体。
Zentralisierte融合
扩展的目标跟踪,通过中央跟踪器,它是由一个传感器和Sensormodalitäten zusammenführt组成的。如果您有一个概率假设密度(PHD)跟踪器,它是Abschätzen运动学的一个跟踪器,它是关于捕获和捕获的对象。在komplexen städtischen Umgebungen实现您需要一个栅格化跟踪器zufälligen endlichen Menge (RFS),它是一个完整的栅格和运动学。

EIN Tracker,Der InStädtischerUmgebnung DieDen Aus Mehreren LidarsZusammenführt。
轨道级融合
Führen您的足迹是我们的足迹,我们的足迹是我们的足迹。请您在麻省理工系统(Bandbreitenbeschränkungen)和麻省理工谣言控制系统(Systemen mit)为您跟踪-跟踪-融合-建筑图伦。

跟踪级融合雷达和激光雷达传感器。
Schätzfilterund datenenduordnung
Schätzen您的主要目标是参考文献Schätzfiltern ab,有卡尔曼滤波,多模型滤波和粒子滤波。发现您的最佳方案为K-Best Solutions für为2D-Z金宝搏官方网站uordnungsproblem为S-D-Zuordnungsproblem。你可以找找看,找找看,找找看,找找看。
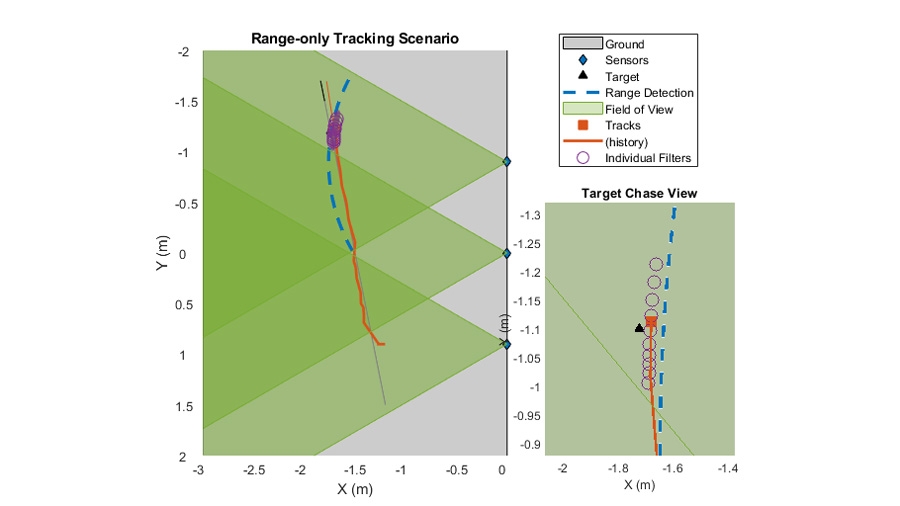
Rein bereichsbasierte Verfolgung mit Nicht-Gaußschen Filtern。
跟踪Mehrerer Objekte.
integrgrieren Sie Schätzfilter, Zuordnungsalgorithmen and Track-Management-Logik in multi - object - tracker, um Detektionen in Tracks zusammenzuführen。我们将以检测格式进行检测,并将gnn跟踪器(全球最近邻)发送至für。如果您有一个简单的JPDA-Tracker(同样的概率Datenzuordnung),一个MHT-Tracker(多个假设)或者一个PHD-Tracker(多个假设),那么您可能会遇到更多的问题。

Verfolgen Sie Eng Beieinander Liegende Objekte Mit Uneindeutigen Messungen。
扩展对象跟踪器和光栅跟踪器
Verwenden Sie Einen Phd-TrackerFürdas跟踪von Kinematik,Größeundausrichtungvon延长的物品。跟踪MIT Rasterbasierten RFS-Trackern Unter Verwendung vonHochauflösendencisordatenwie lidar- undar-punktwolken,Um Dynamische Merkmale von Rasterzellen in VielschichtigenStädtischenGebietenZu Bestimmen。

扩展对象跟踪mit Schätzung von Grösse和Ausrichtung。
轨道级融合
Führensie durch Track Tourts-Sensoren Oder Andere曲目到跟踪 - Fusionsobjekte Generierten曲目Zusammen。Estellen Sie Dezentralisierte Tracking-Systeme MitBandbreitenbeschränkungen。Reduzierung derGerüchteverbreitung(谣言传播)Durch Die Entrifernung Abgelaufener Tracker-Ergebnisse。

航迹-航迹融合。
Fusion-Architekturen.
跟踪器- architekturen kennenlernen和Entwurfskompromisse bewerten zwischen轨迹到轨迹融合,中心点跟踪,混合跟踪。我们的数据(检测)融合,我们的数据是在双统计雷达的IR, ESM下进行的。

跟踪Verwendet分布式同步无源传感器。
物体轨迹和Posengenerierung
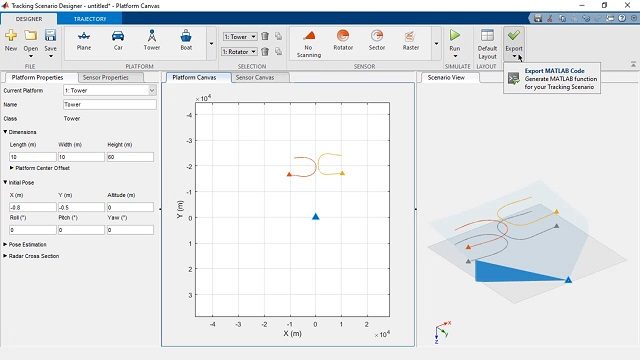
Defieren Sie Szenarien Interaktiv Mit Der跟踪方案设计师 - App underzeugen Sie Matlab-Scripts,DieTatsächliche位置,Geschwindigkeit und Ausrichtung von Objekten在Unterschiedlichen Bezugsrahmen Bestimmen Und Konvertieren。
主动和被动传感器模型
为您的传感器建模(雷达,声纳和激光雷达),目的是为一般的目标。感谢您的机械和电子管理für Azimut, Höhe订购。Modellieren Sie Radarwarnungsempfänger (RWR), elektronisches Unterstützungsmaß (ESM) sowie passive Sonar and Infrarotsensoren, um reine Winkeldetektionen zur Verwendung in trackingszenarien zu generieren。我们将多台雷达和声纳系统建模,并使用Sendern和Sensoren。

追踪mit多数据统计传感器。
Monte-Carlo-Simulateen
Führen您的蒙特卡罗模拟麻省理工学院zufälligen劳施韦尔滕杜尔奇。Stören您的Ground-Truth- and sensorkonfigationen, um die Testrobustheit zu erhöhen。

Störung von Bewegungsbahnen和Sensoren,嗯测试日期是一般的。
Lokalisierung毛皮Tracking-Plattformen
FührenSIEIMU-,GPS-undHöhenmesser-envens-Fusion Durch,UM Ausrichtung und位置IM Zeitverlauf Zu Bestimmten und跟踪Mit Beweglichen Plattflowen ZuErmöglichen。SchätzenSIESUSRICHTUNGUND位置FÜRTRÄCHEITSNAVIGATIONSSYSTEME(INS)IM ZEITVERLAUF MIT算法,DIEFÜR凡尔西埃斯科·苏尔州菲尼州,Ausgangsanforderungen undBewegungsbeschränkungen优化。
INS-Sensormodelle
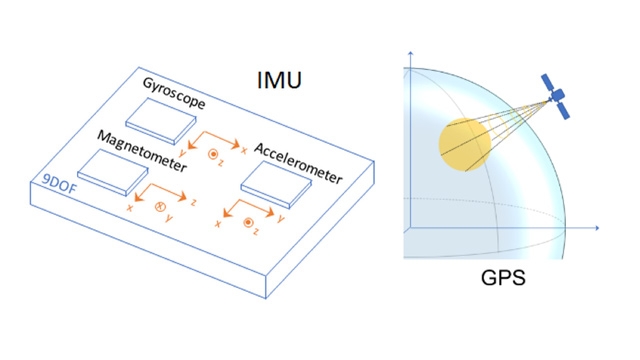
Modellieren SieTrägheitsmessungseinheiten-(IMU),GPS-,Höhenmeter-and Ins-Sensoren。Justieren Sie Umgebungsparameter Wie Hempersatur Sowie Rauscheigenschaften der Modelle,Um Reale Umgebungen Zu Emulieren。
您的模型和gps传感器,嗯Trägheitsfusionsalgorithmen祖测试。
Schätzungder ausrichtung
Führen您可以使用磁力计和电子罗盘。Führen请输入陀螺仪和磁力计- AHRS-Filter(姿态和航向参考系统),网址是schätzen。

Abschätzung der Ausrichtung einer platform durch Zusammenführung von Trägheitssensoren。
Abschatzung·冯·波森
Abschätzen von Posen mit and ohne非完整航向约束mittels Trägheitssensoren和GPS。柏森-伯斯蒙尼GPS durch Zusammenführen von Trägheitssensoren mit Höhenmessern oder visueller里程表。
Visuelle Trägheitsodometrie mit zusammengeführten IMU- und Kameradaten。
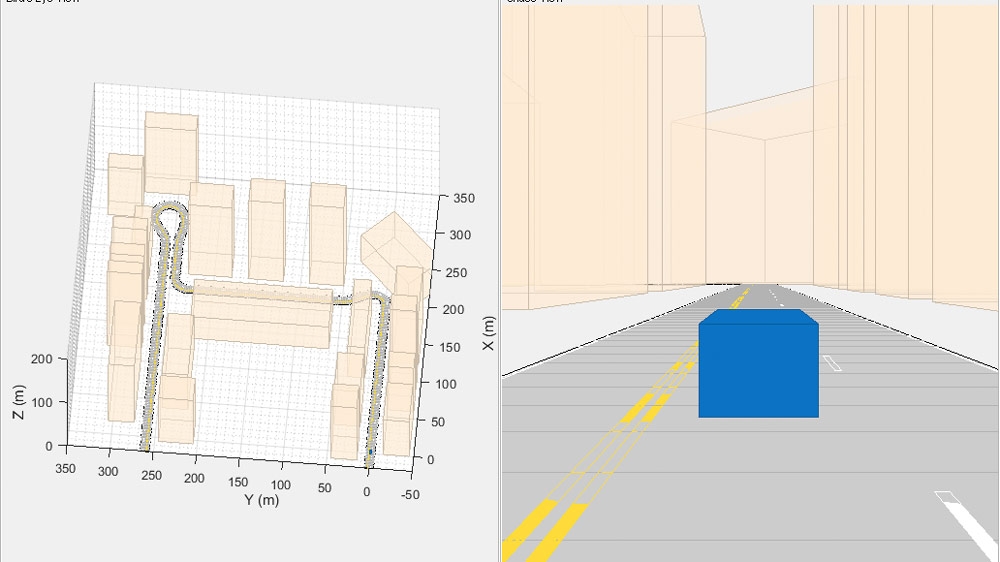
Szenario-Visualisierung
您的目标是Ausrichtung和Geschwindigkeit, Ground Truth-Bewegungsbahnen, Sensormessungen and Tracks grafisch in 3D dar。您在这里发现了涂鸦,并向您表示感谢。请在历史档案中记录。
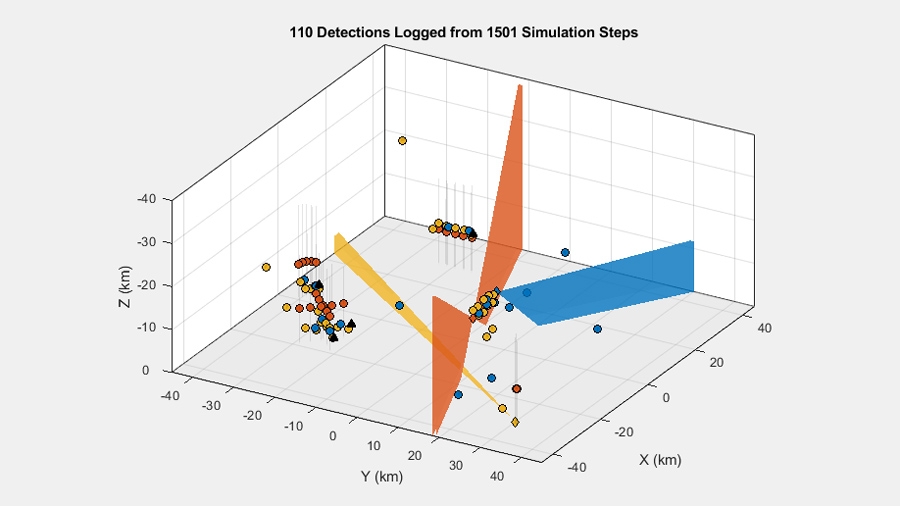
剧场情节是多平台szenarios。
传感器——和Track-Metriken
Erzeugen Sie Track-Einrichtung, Wartung和Detektionsmetriken, einschließlich Track-Länge, Track-Unterbrechungen和Track-ID-Auswechslungen。Schätzen您的轨迹在位置、geschwindigit、Beschleunigung和giergeschwindigit上的正态化的平方(ANEES)下使用了Effektivwertfehler (RMSE)。最后,您要把它和美国的福音联系起来,因为它是我们的福音。分析师您好,我是艾伦·瓦兰兹。

Integrierte Tracking-Metriken zur Bewertung der Tracker-Leistung gegenüber Ground Truth。
justtierung von Filtern and Trackern
多对象跟踪参数Zuordnungsschwellwert, Filter-Initialisierungsfunktion sowie Bestätigungs- und Löschschwellwerte zur Maximierung der Leistung。您将使用vergebnisse verschiedener跟踪器和跟踪器。滤波器自动机,参数是最优的。

跟踪von Punktzielen在dichter Unordnung mit einem gm - phd跟踪。
Codegenerierung
Generieren Sie C/ c++和MEX Code zur simulationsbesleunigung oder zur Desktop-Prototypenentwicklung mitMATLAB编码器™。Wenden Sie Kostenkalkallationsschwertwerte An,UM Weniger Zur Berechnung Zuordnungskosten ZuBenötigen。

跟踪tausender Ziele mit generiertem Code ermöglicht schnellste Simulationszeiten。
RFS-Tracker
Verfolgen Sie Objekte Mit Dem GitterBasierten RFS-Tracker(随机有限集)
Genierung von Bewegungsbahnen.
Estellen von trajektorien mit erdzentrierten wegpunkten
Filter-Tuner毛皮Tragheitssensoren
Automatische AnpassungderTrägheitssensor-fusionsleistungfürsin-,imu-und ahrs-filter
蒙特卡罗模拟
Störvergungsszenarien,Sensoren Und Bewegungsbahnen ZurEterstellungGroßerDutensätzeFür测试
LiDAR-Sensormodell
Generierung Synthetischer Punktwolken Als Teil Von Verfolgungungsssszenarien
跟踪场景Designer-App
Importieren von跟踪szenarien在Die App Zur Visualisierung und Neugestalung
INS-Sensor
Simulink中的ins传感器建模与仿真金宝app
Bewegungsmodelle.
模拟EINER SINGER-BESCHLEUNIGUNGSBEWEGENG
详细信息Zu Diesen Merkmalen und denzugehörigenfunktionen findens sieVersionshinweisen.