sl
2-D和3-D同时定位和映射
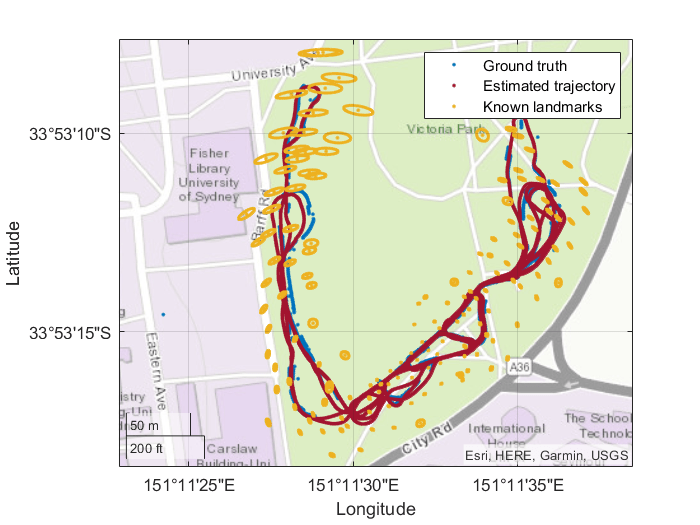
同时localization and mapping (SLAM) uses bothMappingand本地化和姿态估计算法构建地图并在该地图中同时本地化您的车辆。采用Lidarslam.要调整自己的SLAM算法,处理LIDAR扫描和内径测量估计,以迭代地构建地图。采用Buildmap.要记录和过滤数据以创建使用SLAM的地图。这猛拉地图建造者应用程序允许您手动修改相对姿势并对齐扫描以提高地图的准确性。
应用
| 猛拉地图建造者 | 使用基于LIDAR的SLAM构建2-D网格图 |
职能
特色例子



You can also select a web site from the following list:
美洲
- América Latina(Español)
- 加拿大(英语)
- 美国(英语)