模型预测控制工具箱
Diseñe y模拟控制者预测模型
模型预测控制工具箱™比例函数,在Simulink中应用金宝app®Paradiseñary simular controladores mediante el Control predictivo de modelos(mpc)lineal y no lineal。Esta Toolbox渗透特定ModelOS de plantas y Perturbaciones,米兰,restricciones y比索。Puede evalquar el rendimiento del controlador ejecutando simulaciones de bucle cerrado。
Puede ajustar el comportamiento del controlador variando sus pesos y restricciones en tiempo deejecución。Esta Toolbox Proporciona Solvers deOptimizaCiónfsplegablesytambién渗透利用Un Solver Personfizado。Para Controlar UNA Planta没有Lineal,Puede Impeedar Controladores MPC Adaptativos,ConPlanicacióndeGananciaY No Lineales。Para Aplicaciones Con Tasas de MuestreoRápidas,La Toolbox Permite Wener Un Controlador Predicto de Modelos ExpliceCito A Partir de Un Controlador Nuld Omplilear UnaSoluciónAproximada。
Para ElProtipadoRápidoYLaimenticaCióndeSistemasEmbebidos,Cantuido El despliegue de Solvers deOptimización,Esta ToolboS Soporta LaGeneracióndeCódigoCYSeDodoTextoStructurado IEC 61131-3。
旅行:

DocumentoTécnicoGratuito.
Implementación在Simulink上的控制器金宝app
应用MPC设计师
DiseñeControlAdoresMPC de Manera Interactiva Defirdiendo联合国内部植物模型y ajustando los atherthinges,los pesos y las restryciones。Valide El Rendimiento del Controlador Mediante Escenarios deSimulación。比较Las Respuestas de Varios Controladores MPC。
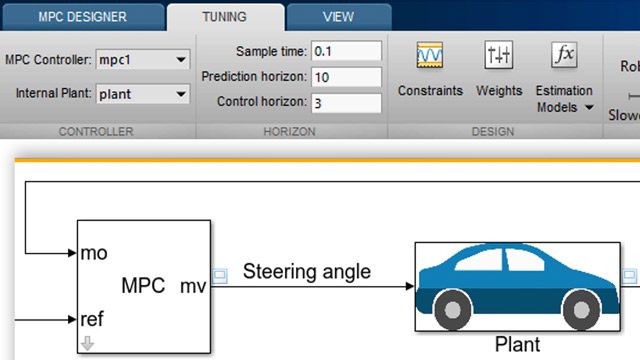
diseñode mpc en s金宝appimulink
Modele Y Simule ControlAdores MPC en 金宝appSimulink Usando El Bloque MPC控制器Y Otros Bloques Proporcionados en Esta Toolbox。Recorte Y Linealice UN Modelo De 金宝appSimulink Para Gusero De Planta Internoile Interneal Internoireden en El Tiempo Para Su Controlador MPC Y ondenga Los Valores名称de Las Entradas Y Salidas de la Planta Mediante金宝app仿真软件控制设计™。
diseñode mpc en matlab
Usily Funciones en lalíneadecandosparadiseñarcontroladores mpc。Defina Un Modelo de Planta Interno Y Ajuste Los Pesos,LAS restricciones Y OtrosParámetrosdel Controlador。Simule La Respuesta del Sistema de Bucle Corrado Para Evaluar El Rendimiento del Controlador。

DiseñododonadoresMPC enLaLíneadeCandos。
Bloques predefinidos
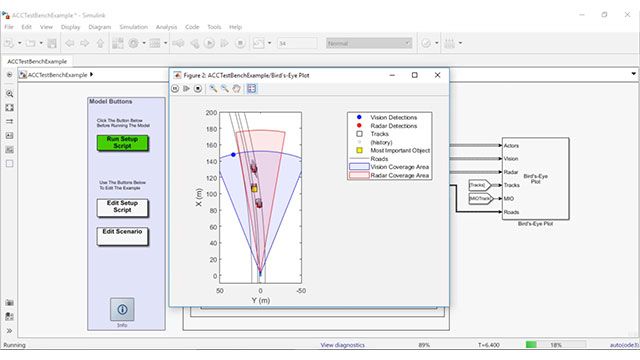
使用自适应巡航控制系统,车道保持辅助系统和路径跟踪控制系统,请参见aplicación ADAS,您也可以参见diseño según。例如código desde los bloques predefinidos para el despliegue en vehículo。
我们要预先定义Simulink的diseñar系统来控制自适金宝app应。
Ejemertos de Aplicaciones de参考
因此,我们可以把我们的应用程序和参考程序结合起来,把我们的目标放在diseñar上,把我们的MPC结合起来,放到conducción autónoma上。参考文献的应用程序también muestran cómo我们的理论和实践的不同之处是不同的。
MPC直系
Disceñe联合国控制机MPC Lineal EqcificandoO UN Modelo De Planta Interno Como联合国SISTema Lineal en En El Tiempo(LTI)CreaeCon Control System Toolbox™,o Bien Linealizando Un Modelo De Simulink Con Simulink Co金宝appnsogn设计。TambiénPuedeImportAl UN MOLUDO CREADO A Partir de Datos Medidos de entinada y Salida Mediante系统识别工具箱™。

Especificación de de planta interno para and diseño de MPC直系。
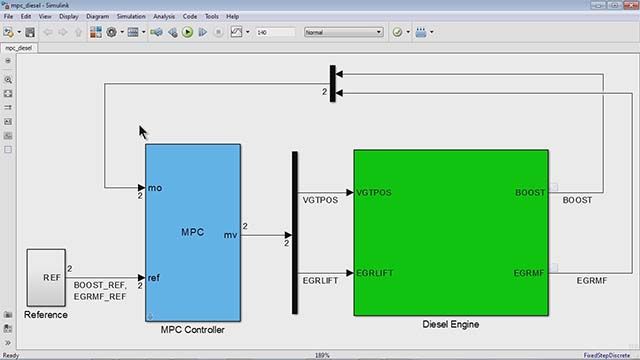
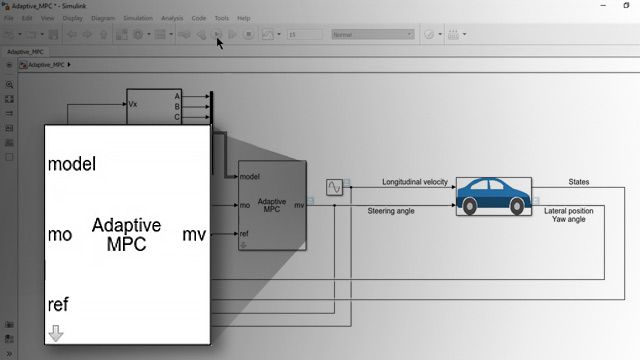
MPC adaptativo
Diseñe y simplecontroladores MPC adaptivativos usando funciones en la línea de comandos y el bloque自适应MPC控制器。实际的植物模型是在ejecución或proporciónelo的时间内为控制的。利用Kalman时间线性变量(LTV)的过滤,整合garantía de estabilidad asintótica para la estimación estado和模型适应性的预测。
MPC ConPlanicacióndeGanancia
Controle Plantas No Lineales EN UNA Amplia Variedad de Condiciones Operativas Con El Bloque多MPC控制器。Disceñe联合国控制员MPC帕拉CADA Punto Operativo Y Cambie De Controlador en Tiempo deEjecución。

Uso del block Multiple MPC Controllers para diseñar controladores MPC con planificación de ganancia。
Parametros del controlador
Despuésde Demaveir El Modelo de Planta Interno,Complient ElDiseñodel Controlador MPC Especificando El Tiempo de Muestreo,Los Horizocties dePredicciónyConvallyscoplyscenala,Las Restricciones de Intrada Y Salida,Y Los Pesos。Esta ToolboxTambiénes兼容Con El Suavizado de Las Restricciones,Y Con Restricciones Y Pesos Variantes en En El Tiempo。

EspecificacióndeLosParámetrosdel Controlador en La App MPC设计师。
Estimacion del带动下
estime los estados del Controlador a partir de salidas medidas con el eltime de estado interlado。TambiénPuedeUtilizar联合国Algoritmo PersonalizoO Para Enferar El Estado。
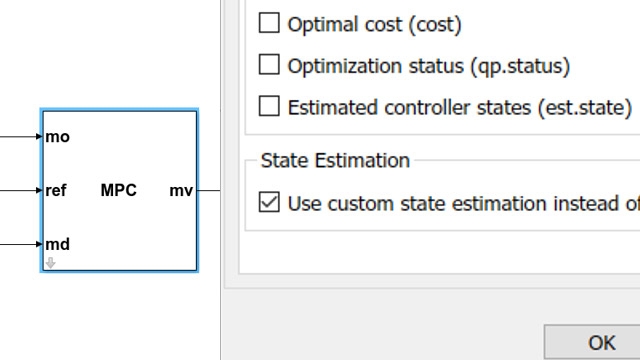
Estimación del estado personalizada。
修订del diseno
检测位置博德斯·塞尔德斯en El Controlador MPC Mediante LaFuncióndedatumoInclicators。Usilico洛杉矶Ajustar Los Pesos Y Las Restricciones Durante ElDiseñodel Controlador y evitar fallos en tiempo deejecución。

Mejora delDiseñodel Controlador Siguiendo Las Recomendaciones del Informe deRevisióndeldiseño。
调整parámetros en tiempo ejecución
调整控制和MPC的限制,以便在ejecución的时间内进行优化,并在rediseñarlo的时间内重新实施。在MATLAB中实现控制器的实时调整®como zhi金宝app simulink。
Ajuste de Pesos y restricciones en tiempo deejecución。
Supervisión del rendimiento en tiempo de ejecución
Acceda A LaSeñaldelestadodeOptimizaciónpara探测器Las Raras ocasiones en las que UnaOptimizaciónpuedeno olderger。利用伊斯兰教徒奥斯特·突南决策Sobre Estrategias de Control de Copias de Seguridad。

Detección我的时间是真实的。
MPC explicito
Genere un controlador explícito a partir del diseño de un MPC implícito para acelerar la ejecución。简化控制器explícito generado,还原记忆。

Generación de un controlador MPC explícito a part de un controlador implícito diseñado previamente。
Soluciónaproximada(Subóptima)
Disceñe,Simule Y Despliegue联合国Controlador MPC Con Tiempo deEjecuciónGarantizadoen El Peor de Los Casos Usando UnaSoluciónAproximada(Subóptima)。
ComparacióndeLOSTIEMPOSdeEjecucióndeNoaSoluciónóptimayOtraaproximada(Subóptima)。
PlanificAciónóptima.
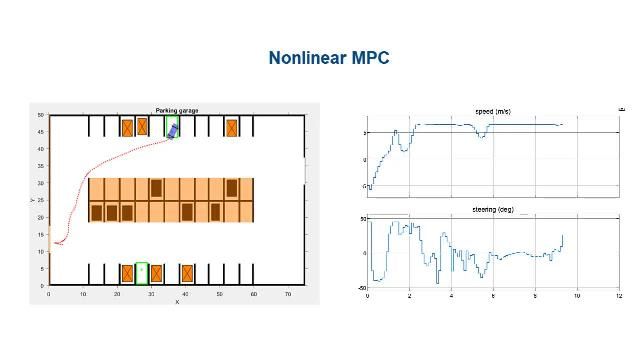
利用控制机构MPC无线肛门APLICACIONES dePlanicación-QueReqieran Un Modelo No Lineal Con花费o restricciones没有Lineales。

Optimizacióndefrayectriay控制de联合国机器人Volador Mediante MPC无线。
系统控制retroalimentación
在没有线的情况下,植物的塞拉多植物的控制系统与没有线的限制系统是相同的。根据预先确定的形式,控制者利用优化工具箱解决programación没有线性的问题。También具体的程序求解器没有直系个性化。

Sistema de Control Predictivo de Modelos No Lineal de UN反应堆QuímicoExotérmico。
MPC期中
Diseñe控制者MPC económicos para optimizar el controlador para una función de cost arbitrary con ciciones no lineales arbitrary。您可以使用一个模式predicción直系的或无直系的,一个función的成本没有直系的个性化限制,没有直系的个性化。
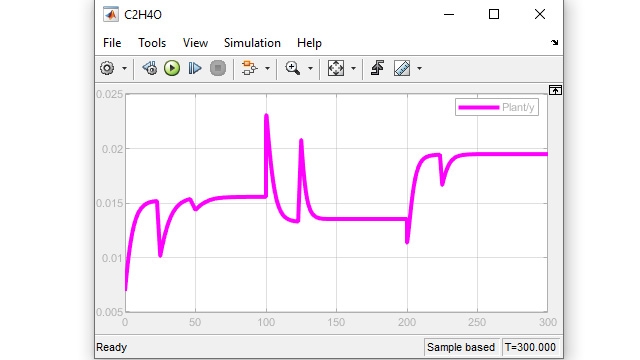
Sistema de control MPC económico para la producción de óxido de etileno。
Generación de código con MATLAB y 金宝appSimulink
Disceñe联合控件MPC en Simulink Y 金宝appGenereCódigoC O Texto EstructuRado IEC 61131-3 Mediante Simulink Coder™O Simulink PLC Coder™,尊重。利用MATLAB编码器™Para PersentarCódigoc en matlab ydespliéguelopara sistemas de控制en tiempo真实。tambiénpuede实用matlab compiler™para empaquetar y compartir su controlador mpc como unaaplicaciónformentee。
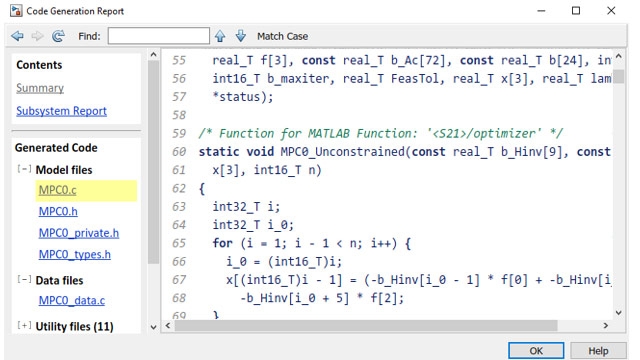
Fillacióndecódigoc a partil del Bloque MPC控制器。
解决integrados
generere código desde los solvers de programación cuadrática (QP) de conjunto activo de punto interior proporcionados para lograr implementación efficiente en procesadores embebidos。Para problems no lineales, utilice el solver programación cuadrática secuencial (SQP) de Optimization Toolbox Para similar y generar código。请讲código generado en a cantidad de procesadores que ee。
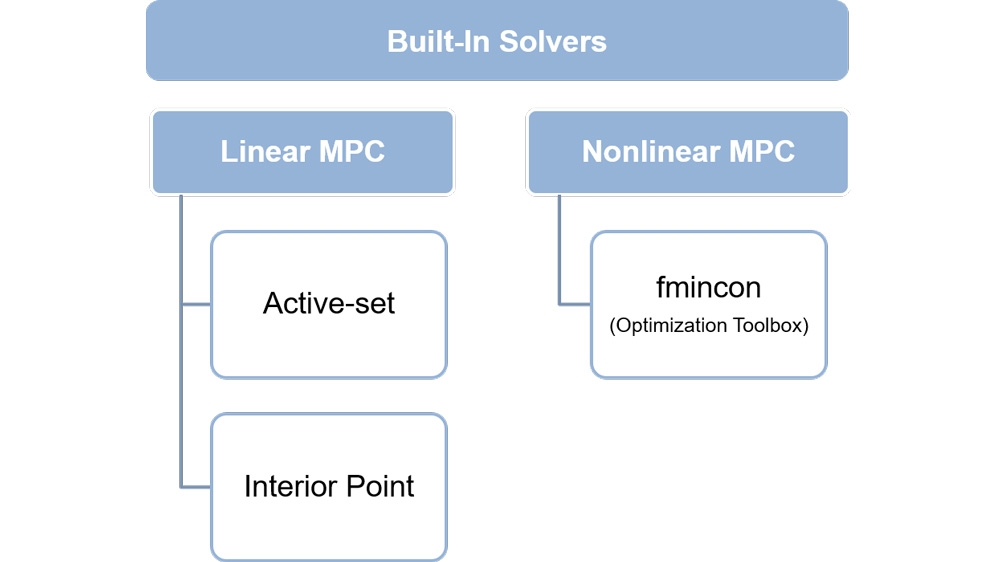
求解器整合。
求解器Personalizados.
利用洛杉矶·索尔普尔斯QP Y NLP(ProgramAción没有Lineal)部队Pro DeEmbotech拟合一般código拟合MPC线性和无线性的控制。最好的方法是使用类似于código的方法来解决QP和NLP个性化问题。
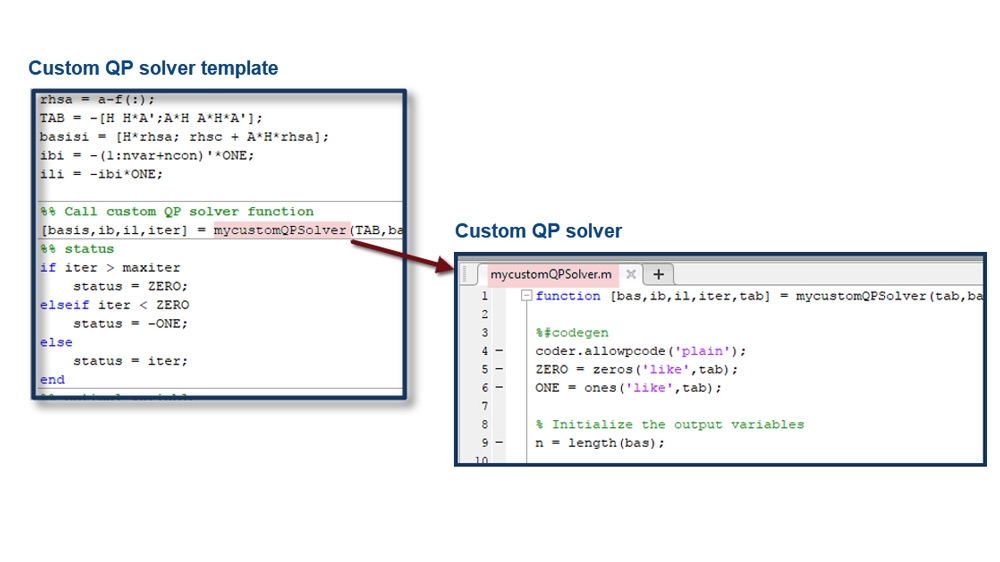
解决QP个性化para la simulación y la generación de código。