Explore the Hybrid Electric Vehicle P4 Reference Application
The hybrid electric vehicle (HEV) P4 reference application represents a full HEV model with an internal combustion engine, transmission, battery, motor, and associated powertrain control algorithms. Use the reference application for hardware-in-the-loop (HIL) testing, tradeoff analysis, and control parameter optimization of a HEV P4 hybrid. To create and open a working copy of the reference application project, enter
By default, the HEV P4 reference application is configured with:锂离子电池组
映射的电动机
映射的火花点(SI)引擎
该图显示了动力总成配置。

This table describes the blocks and subsystems in the reference application, indicating which subsystems contain variants. To implement the model variants, the reference application uses variant subsystems.
| Reference Application Element | 描述 | 变体s |
|---|---|---|
Analyze Power and Energy |
Double-clickAnalyze Power and Energyto open a live script. Run the script to evaluate and report power and energy consumption at the component- and system-level. For more information about the live script, seeAnalyze Power and Energy。 |
NA |
驱动周期源块-FTP75(2474秒) |
生成标准或用户指定的驱动周期速度与时间配置文件。块输出是所选或指定的车辆纵向速度。 |
✓ |
Environment子系统 |
Creates environment variables, including road grade, wind velocity, and atmospheric temperature and pressure. |
|
Longitudinal Driver子系统 |
Uses theLongitudinal Driveror Open Loop variant to generate normalized acceleration and braking commands.
|
✓ |
控制器子系统 |
实现包含P4混合控制模块(HCM),发动机控制模块(ECM)和传输控制模块(TCM)的动力总成控制模块(PCM)。 |
✓ |
乘用车子系统 |
实施包含传动系统,电厂和发动机子系统的混合乘用车。 To model the drivetrain, use the切换到Simscape传动系统button to switch between Simscape™ and Powertrain Blockset™ variants of the drivetrain subsystem. By default, the reference application uses the Powertrain Blockset variant. The Simscape variant incorporates physical connections to provide a flexible way to assemble components. |
✓ |
Visualization子系统 |
Displays vehicle-level performance, battery state of charge (SOC), fuel economy, and emission results that are useful for powertrain matching and component selection analysis. |
评估和报告电力和能源
Double-clickAnalyze Power and Energyto open a live script. Run the script to evaluate and report power and energy consumption at the component- and system-level. For more information about the live script, seeAnalyze Power and Energy。
The script provides:
您可以导出到Excel的总体能量摘要®电子表格。
发动机厂,电厂和动力传动系统的植物效率,包括在不同发动机厂效率上花费时间的发动机直方图。
数据记录,以便您可以使用仿真数据检查器分析动力总成效率和能量传输信号。
驱动周期源
The驱动周期源块为选定或指定的驱动周期生成目标车辆速度。参考应用程序具有这些选项。
| 定时 | 变体 | 描述 |
|---|---|---|
输出样本时间 |
|
连续操作员命令 |
|
离散的operator commands |
Longitudinal Driver
TheLongitudinal Driver子系统生成标准化的加速度和制动命令。参考应用程序具有这些变体。
Block Variants |
描述 | ||
|---|---|---|---|
纵向驱动器(默认) |
Control |
|
PI control with tracking windup and feed-forward gains that are a function of vehicle velocity. |
|
Optimal single-point preview (look ahead) control. |
||
|
Proportional-integral (PI) control with tracking windup and feed-forward gains. |
||
Low-pass filter (LPF) |
|
在目标速度误差上使用LPF进行更顺畅的驾驶。 |
|
|
请勿在速度错误上使用过滤器。 |
||
Shift |
|
Stateflow®图表型号逆转,中性和驱动齿轮移动计划。 |
|
|
Input gear, vehicle state, and velocity feedback generates acceleration and braking commands to track forward and reverse vehicle motion. |
||
|
没有传输。 |
||
|
StateFlow图表模型逆转,中性,公园和N速换档计划。 |
||
Open Loop |
Open-loop control subsystem. In the subsystem, you can configure the acceleration, deceleration, gear, and clutch commands with constant or signal-based inputs. |
||
要在驱动周期开始时闲置发动机,并在使用踏板命令移动车辆之前模拟催化剂灯,请使用纵向驱动器变体。纵向驱动程序子系统包括点火开关信号配置文件,IgSw。The engine controller uses the ignition switch signal to start both the engine and a catalyst light-off timer.
The catalyst light-off timer overrides the engine stop-start (ESS) stop function control while the catalyst light-off timer is counting up. During the simulation, after theIgSwdown-edge time reaches the catalyst light-off timeCatLightOffTime, normal ESS operation resumes. If there is no torque command before the simulation reaches theEngStopTime,ESS关闭了引擎。
控制ESS和催化剂的灯光:
In the Longitudinal Driver Model subsystem, set the ignition switch profile
IgSwto 'on'。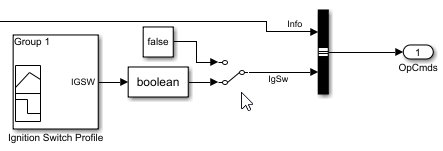
在发动机控制器模型工作区中,设置以下校准参数:
EngStopStartEnable- 启用ESS。要禁用ESS,请将价值设置为false。CatLightOffTime— Engine idle time from engine start to catalyst light-off.EngStopTime— ESS engine run time after driver model torque request cut-off.

控制器
The控制器子系统具有包含ECM,HCM和TCM的PCM。控制器具有这些变体。
乘用车
为了实施乘用车,乘用车子系统contains drivetrain, electric plant, and engine subsystems. To create your own engine variants for the reference application, use the CI and SI engine project templates. The reference application has these variants.
Drivetrain
To model the drivetrain, use the切换到Simscape传动系统button to switch between Simscape and Powertrain Blockset variants of the drivetrain subsystem. By default, the reference application uses the Powertrain Blockset variant. The Simscape variant incorporates physical connections to provide a flexible way to assemble components.
Tip
参考应用程序设置了适当的求解器,以优化每个发动机和传动系统组合的性能。首先选择发动机变体,然后使用切换按钮选择传动系统。如果在更改引擎之前选择传动系统,则可能会遇到求解器错误。
| 传动系统子系统 | 变体 | 描述 | |
|---|---|---|---|
Differential and Compliance |
|
You can vary the type of coupling torque and efficiency. By default, the differential is configured with an ideal wet clutch and constant efficiency. |
|
|
您可以改变差异效率的类型。默认情况下,开放式差异是用恒定效率配置的 |
||
扭矩转换器自动变速器 |
Ideal Fixed Gear Transmission |
Configure locked and unlocked transmission efficiency with either a 1D or 4D (default) lookup table. |
|
Torque Converter |
配置外部,内部(默认)或无锁定。 |
||
Vehicle |
车身1 DOF纵向 |
Configured for 1 degrees of freedom |
|
车轮和制动器 |
|
对于车轮,您可以配置以下类型:
For performance and clarity, to determine the longitudinal force of each wheel, the variants implement the纵向轮block. To determine thetotal所有车轮的纵向力作用在妳e, the variants use a scale factor to multiply the force of one wheel by the number of wheels on the axle. By using this approach to calculate the total force, the variants assume equal tire slip and loading at the front and rear axles, which is common for longitudinal powertrain studies. If this is not the case, for example when friction or loads differ on the left and right sides of the axles, use unique Longitudinal Wheel blocks to calculate independent forces. However, using unique blocks to model each wheel increases model complexity and computational cost. |
|
|
|||
电厂
| 电厂Subsystem | 变体 | 描述 |
|---|---|---|
Battery |
BattHevP4 |
配置了锂离子电池 |
Electric Machine |
MotMapped |
Mapped Motor与隐式控制器 |
Engine
| Engine Subsystem | 变体 | 描述 | |
|---|---|---|---|
| Engine |
|
DynamicSI Core Engine与涡轮增压器 |
|
|
映射的Si发动机带有隐式涡轮增压器 |
||
|
Dynamic naturally aspirated SI Core Engine |
||
限制
MathWorks®used theSI Core EngineandSI Controllerto calibrate the hybrid control module (HCM). If you use theCI Core EngineandCI控制器变体,模拟可能会误差,因为HCM不使用校准结果。
Acknowledgment
contributi MathWorks愿意承认on of Dr. Simona Onori to the ECMS optimal control algorithm implemented in this reference application. Dr. Onori is a Professor of Energy Resources Engineering at Stanford University. Her research interests include electrochemical modeling, estimation and optimization of energy storage devices for automotive and grid-level applications, hybrid and electric vehicles modeling and control, PDE modeling, and model-order reduction and estimation of emission mitigation systems. She is a senior member of IEEE®。
References
[1] Balazs,A.,Morra,E。和Pischinger,S。,Optimization of Electrified Powertrains for City Cars。SAE技术论文2011-01-2451。宾夕法尼亚州沃伦代尔:SAE国际替代动力总成杂志,2012年。
[2] Onori, S., Serrao, L., and Rizzoni, G.,混合动力汽车能源管理系统。New York: Springer, 2016.
See Also
驱动周期源|Longitudinal Driver|映射的Si发动机|SI Core Engine|SI Controller|映射的CI引擎|CI Core Engine|CI控制器|Mapped Motor