可视化调优目标
当你调优控制系统时systune或控制系统调谐器,使用调优目标图将您的设计需求与调优后的控制系统响应可视化。调优目标图以图形方式显示了在何处满足或违反调优目标的程度。这个可视化可以让你检查你的控制系统有多接近理想的性能。它还可以帮助您识别调优中的问题,并提供关于如何改进设计的线索。
调优目标地块
如何获得调优目标图取决于您的工作环境。
在命令行中,使用
viewGoal.在控制系统调谐器,您创建的每个调优目标都会生成一个调优目标图。当您调优控制系统时,这些图会更新以反映调优后的设计。
调优目标图的形式取决于您使用的特定调优目标。
时域目标
对于时域调优目标,调优目标图是相关系统响应的时域图。下面的情节,改编自例子柴油机MIMO控制,给出了时域抗扰目标的典型调优目标图。虚线表示调优目标中指定的最坏可接受的步骤响应。实线表示调谐系统的相应响应。

频域的目标
频域调谐目标图显示了目标响应和调谐后的频域响应。下面的情节,改编自例子客机固定结构自动驾驶仪,表示增益目标的图(TuningGoal。获得在命令行)。此调优目标将指定输入和输出之间的增益限制为与频率相关的配置文件。在图中,虚线显示调优目标中指定的增益剖面。如果调优的系统响应(实线)进入阴影区域,则违背了调优目标。在这种情况下,调谐目标在所有频率都得到满足。

利润目标
有关解释稳定边际目标的调优目标图的信息,请参见控制系统优化中的稳定裕度.
虚线和阴影区域的区别
对于某些频域调优目标,您在调优目标中指定的增益配置文件与软件用于调优的配置文件之间可能存在差异。在这种情况下,图的阴影区域反映了软件用于调优的配置文件。您指定的增益配置文件和用于调优的增益配置文件在以下情况下可能不同:
在离散时间内优化控制系统,但在连续时间内指定增益剖面。
该软件修改渐近线的指定增益剖面,以提高数值稳定性。
离散时间调谐的连续时间增益剖面
调优离散控制系统时,可以使用离散时间或连续时间传递函数指定频率相关的调优目标。如果使用连续时间传递函数,调优算法会在调优之前离散传递函数。例如,假设您如下所示指定一个调优目标。
W = zpk([],[0 -150 -150],1125000);Req = TuningGoal。MaxLoopGain (“Xloc”, W);
进一步假设您使用的调优目标是systune调优一个离散时间一族模型或slTuner接口。CL是由此产生的调谐控制系统。为了检查结果,生成一个调优目标图。
viewGoal(点播,CL)

这幅图显示W,您指定的连续时间最大循环增益,以虚线表示。阴影区域显示的离散版本W那systune用于调优。的采样时间对应的奈奎斯特频率处离散化最大环路增益截止CL.在该截线附近,阴影区域偏离虚线。
该图强调,有时最好使用离散增益配置文件为离散时间调优指定调优目标。特别地,指定离散时间配置文件使您可以更好地控制增益配置文件在奈奎斯特频率附近的行为。
数值稳定性的修正
当使用具有频率依赖规范的调优目标时,调优算法使用频率加权函数来计算调优目标的规范化值。此加权函数由您指定的增益配置文件派生。为了数值的可处理性,加权函数必须是稳定和适当的。为了数值稳定性,它们的动态必须与控制系统动态在相同的频率范围内。由于这些原因,软件可以调整指定的增益剖面,以消除不需要的低频或高频动态或渐近线。为更好的数值调节而修改调优目标的过程被称为正则化.
例如,考虑以下跟踪目标。
R1 = TuningGoal。跟踪(“r”,“y”,tf([1 0 0],[1 2 1]);viewGoal (R1)
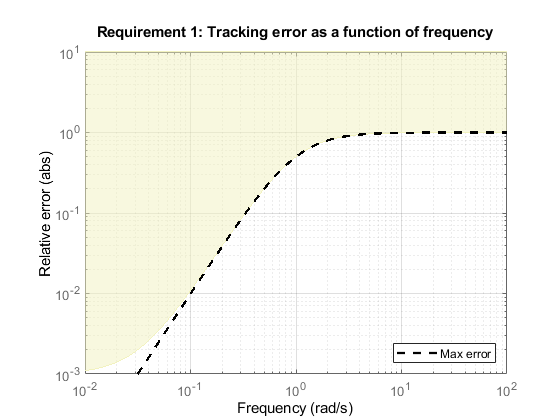
在这里,控制带宽约为1 rad/s,增益剖面在s = 0处有两个零,这成为加权函数中的不稳定极点(参见TuningGoal。跟踪详情)。正则化将这些零点移动到约0.01 rad/s,最大跟踪误差水平约为103(0.1%)。如果需要更好的跟踪精度,可以在误差配置文件中显式指定截止频率。
R2 = TuningGoal。跟踪(“r”,“y”,tf([1 0 5e-8],[1 2 1]);viewGoal (R2)集(gca,“Ylim”, 1的军医,10)

然而,为了数值安全,正则化加权函数总是在非常低和非常高的频率电平,不管指定的增益轮廓。
访问正则化函数
在命令行上工作时,可以使用getWeight或getWeights命令。有关详细信息,请参阅调优算法执行正则化的各个调优目标的参考页面:
在控制系统调谐器时,不能直接查看正则化加权函数。相反,使用tuning-goal命令生成等效的调优目标,并使用getWeight或getWeights访问正则化函数。
改善调优结果
如果调优结果不能充分满足您的设计需求,请调整您的调优目标集以改进结果。例如:
将必须有需求的调优目标指定为硬目标。或者,通过将它们指定为软目标来放松不是绝对需求的调优目标。
限制执行频域目标的频率范围。
在控制系统调谐器,使用在频率范围内执行目标字段的值。
在命令行中,使用
焦点的属性TuningGoal对象。
如果调优结果确实满足您的设计要求,您可以验证调优后的控制系统验证调谐控制系统.
另请参阅
相关的话题
您也可以从以下列表中选择一个网站:
