文档帮助中心文档
这些示例说明了如何设置硬件,访问硬件数据,并使用传感器融合和跟踪工具箱™中提供的算法处理这些数据。
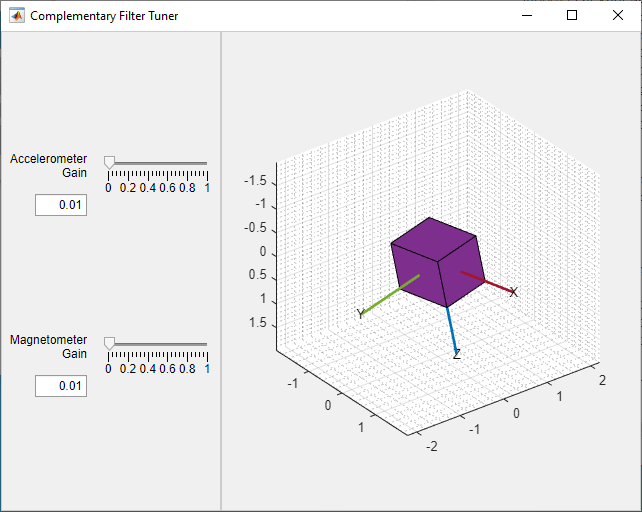
从Arduino流IMU数据,并使用互补滤波器估计方向。
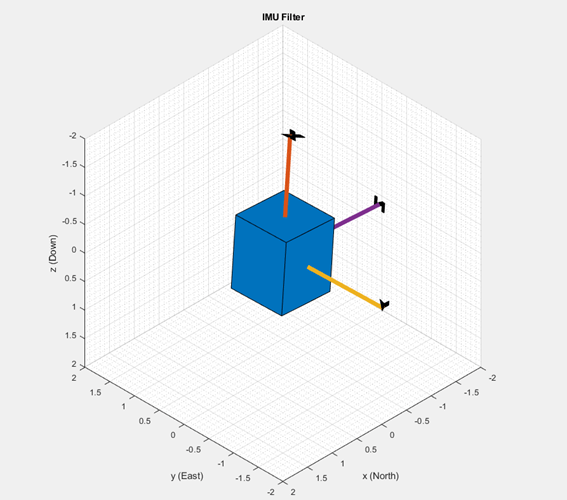
从InvenSense MPU-9250 IMU传感器中获取数据,利用传感器数据中的6轴和9轴融合算法计算设备的方向。
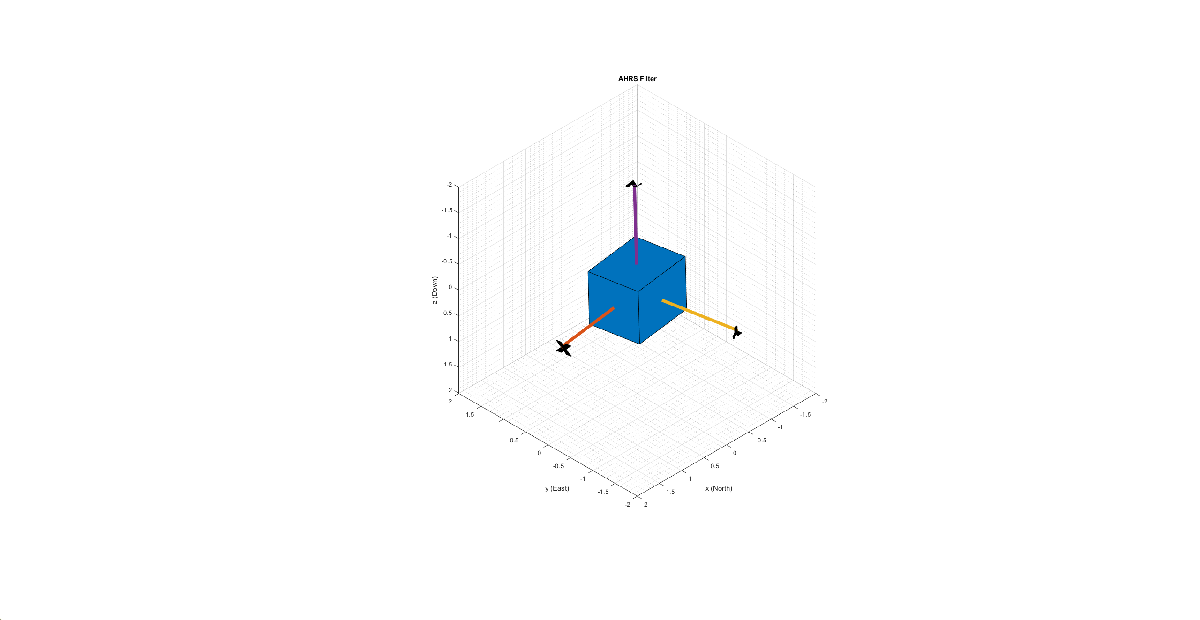
通过HC-05蓝牙®模块从博世BNO055 IMU传感器获取数据,并对传感器数据使用9轴AHRS融合算法计算设备的方向。这个例子创建了一个随着移动设备而更新的图形。
通过融合来自IMU的数据来跟踪声源的方向,然后应用声源相关传递函数(HRTF)来控制声源的到达方向。
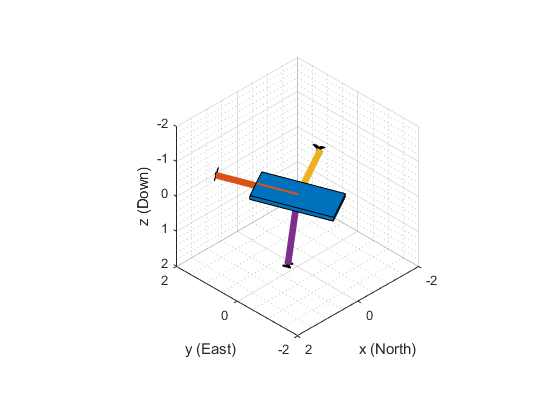
MATLAB Mobile™报告来自苹果或Android移动设备上的加速度计、陀螺仪和磁强计的传感器数据。可以从每个传感器获得原始数据或融合方向数据。这个例子展示了如何比较融合的方向数据从手机和方位估计从ahrsfilter对象。
您点击了对应于这个MATLAB命令的链接:
在MATLAB命令窗口中输入命令运行该命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在可用的地方获得翻译的内容,并查看当地的事件和提供。根据您所在的位置,我们建议您选择:.
您也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站表现。其他MathWorks国家网站不适合从您的位置访问。
联系当地办事处