文档帮助中心文档
这些示例应用传感器融合和滤波技术,使用IMU、GPS和摄像头数据定位平台。
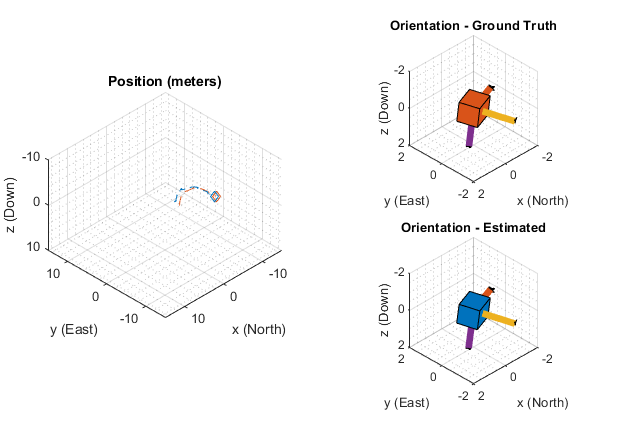
如何构建适用于无人机(UAV)或四架直升机的IMU+GPS融合算法。
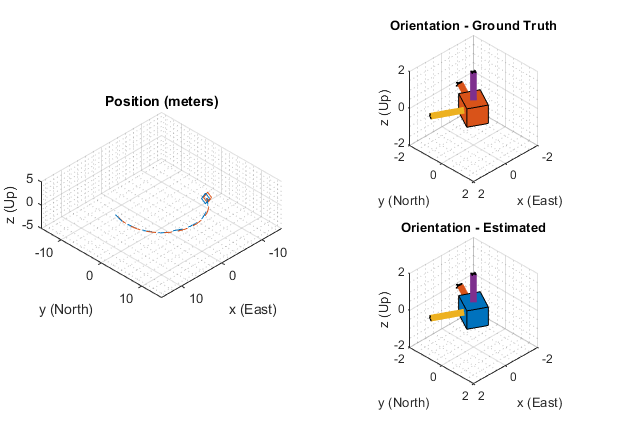
通过融合来自惯性测量单元(IMU)和全球定位系统(GPS)接收器的数据,估计地面车辆的位置和方向。
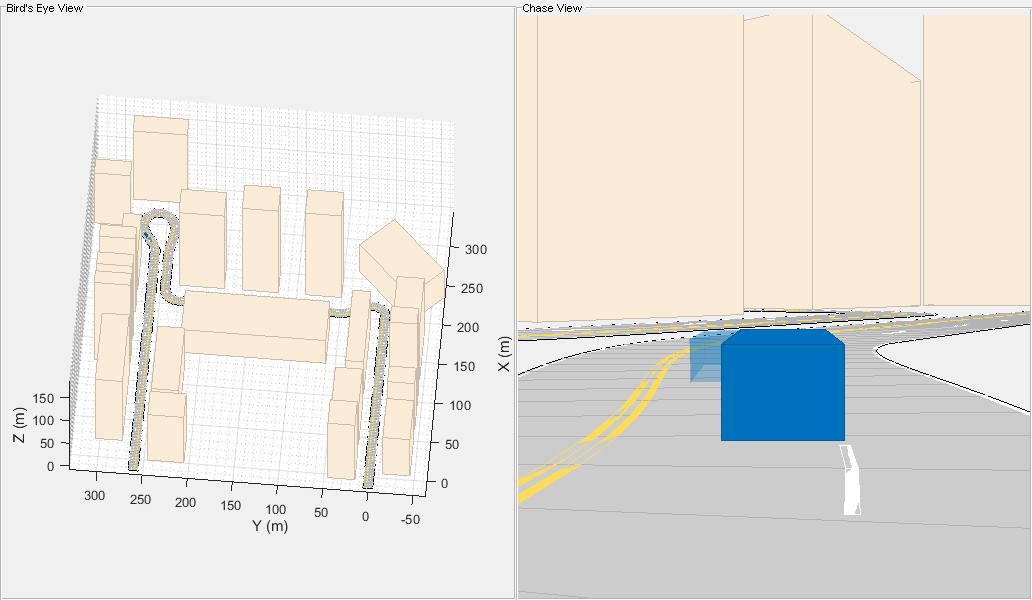
使用惯性测量单元(IMU)和单目摄像机估计地面车辆的姿势(位置和方向)。在本例中,您可以:
您单击了与此MATLAB命令对应的链接:
通过在MATLAB命令窗口中输入命令来运行该命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站以获取翻译后的内容(如果可用),并查看本地活动和优惠。根据您的位置,我们建议您选择:.
您还可以从以下列表中选择网站:
选择中国站点(中文或英文)以获得最佳站点性能。其他MathWorks国家/地区网站未针对您所在地的访问进行优化。
联系当地办事处