主要内容
fusecovint
用协方差交进行协方差融合
语法
描述
[熔断轨道状态fusedState,fusedCov) = fusecovint (trackState,trackCov)trackState以及它们对应的协方差矩阵trackCov.该函数将融合状态和协方差作为单个协方差的交集来计算。它创建协方差的凸组合,并找到使融合协方差矩阵行列式最小化的权值。
[通过最小化估计融合协方差fusedState,fusedCov) = fusecovint (trackState,trackCov,minProp)minProp,可以是融合协方差矩阵的行列式,也可以是融合协方差矩阵的迹。
例子
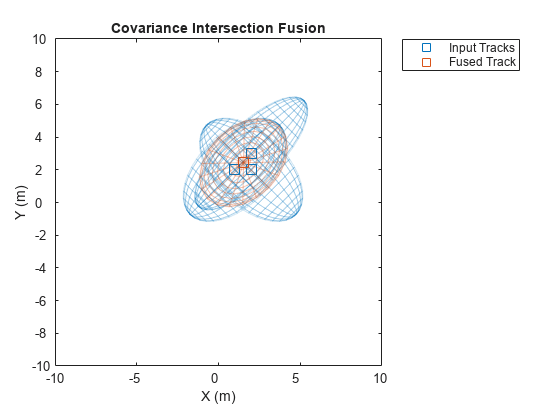
协方差交集融合使用默认值
定义轨迹的状态向量。
x(: 1) =(1; 2。0);x(:, 2) =(2; 2。0);x (:, 3) = (2, 3, 0);
定义轨道的协方差矩阵。
P (:,:,1) = [10 5 0;5 10 0;0 0 1);P (:,: 2) = [10 -5 0;5 10 0;0 0 1);P (:,:,3) = [12 9 0;9 12 0;0 0 1);
估计融合状态向量及其协方差。
[fusedState, fusedCov] = fusecovint (x, p);
使用trackPlotter来绘制结果。
tPlotter = theaterPlot (“XLim”-10年[10],“YLim”-10年[10],“ZLim”, -10年[10]);tPlotter1 = trackPlotter (tPlotter,...“DisplayName的”,“输入追踪”,“MarkerEdgeColor”[0.000 0.447 0.741]);tPlotter2 = trackPlotter (tPlotter,“DisplayName的”,...“融合跟踪”,“MarkerEdgeColor”[0.850 0.325 0.098]);plotTrack (tPlotter1 x ' p) plotTrack (tPlotter2, fusedState fusedCov)标题(“协方差交叉融合”)
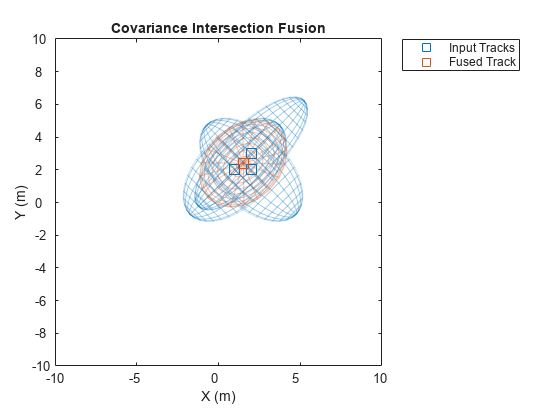
基于轨迹最小化的协方差交叉融合
定义轨迹的状态向量。
x(: 1) =(1; 2。0);x(:, 2) =(2; 2。0);x (:, 3) = (2, 3, 0);
定义轨道的协方差矩阵。
P (:,:,1) = [10 5 0;5 10 0;0 0 1);P (:,: 2) = [10 -5 0;5 10 0;0 0 1);P (:,:,3) = [12 9 0;9 12 0;0 0 1);
估计融合状态向量及其协方差。合并原始协方差,使融合后的协方差矩阵迹最小。
[fusedState, fusedCov] = fusecovint (x, p,“跟踪”);
使用trackPlotter来绘制结果。
tPlotter = theaterPlot (“XLim”-10年[10],“YLim”-10年[10],“ZLim”, -10年[10]);tPlotter1 = trackPlotter (tPlotter,...“DisplayName的”,“输入追踪”,“MarkerEdgeColor”[0.000 0.447 0.741]);tPlotter2 = trackPlotter (tPlotter,...“DisplayName的”,“融合跟踪”,“MarkerEdgeColor”[0.850 0.325 0.098]);plotTrack (tPlotter1 x ' p) plotTrack (tPlotter2, fusedState fusedCov)标题(“协方差交叉融合”)
输入参数
输出参数
参考文献
[1] Matzka, Stephan和Richard Altendorfer。”汽车传感器融合中轨迹-轨迹融合算法的比较。智能系统的多传感器融合与集成,第69-81页。施普林格,柏林,海德堡,2009。
[2] Julier Simon和Jeffrey K. Uhlmann "基于协方差交集的广义分散数据融合。多传感器数据融合手册,第339-364页。CRC出版社,2017年。
扩展功能
另请参阅
介绍了R2018b
你也可以从以下列表中选择一个网站: