主要内容
Fusecovunion
协方差融合使用协方差联盟
描述
[融合轨道状态fusedState那Fusedcov.] = fusecovunion(TrackState.那TrackCov.的)TrackState.及其相应的协方差矩阵TrackCov.。该功能以维持一致性的方式估计融合状态和协方差。有关更多详细信息,请参阅一致的估算器。
例子
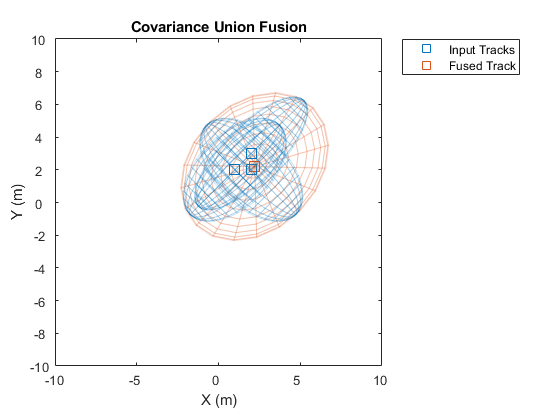
协方差联盟融合
定义轨道的状态矢量。
x(:,1)= [1; 2; 0];x(:,2)= [2; 2; 0];x(:,3)= [2; 3; 0];
定义轨道的协方差矩阵。
P(:,:,1)= [10 5 0;5 10 0; 0 0 1];p(:,:,2)= [10 -5 0;-5 10 0; 0 0 1];P(:,:,3)= [12 9 0;9 12 0; 0 0 1];
估计融合状态向量及其协方差。
[融合,Fusedcov] = fusecovunion(x,p);
用Trackplotter.绘制结果。
tPlotter = theaterPlot ('xlim',[ - 10 10],'ylim',[ - 10 10],'zlim',[ - 10 10]);tplotter1 = trackplotter(tplotter,......'显示名称'那'输入轨道'那'markeredgecolor',[0.447 0.741]);tplotter2 = trackplotter(tplotter,......'显示名称'那'融合轨道'那'markeredgecolor',[0.850 0.325 0.098]);plottrack(tplotter1,x',p)plottrack(tplotter2,fusedstate',fusedcov)标题('协方差联盟融合'的)
输入参数
输出参数
更多关于
参考文献
[1] Reece,Steven和Stephen Rogers。“普遍协方差联盟:追踪融合融合的统一方法。”IEEE.®航空航天和电子系统的交易。卷。46,1月1日,2010年1月1日,第207-221页。
扩展能力
也可以看看
在R2018B中介绍
您还可以从以下列表中选择一个网站: