在Simulink中用GM-PHD跟踪器跟踪密集杂波中的点目标金宝app
雷达一般接收信号路径中所有表面的回波。这些不需要的后向散射信号或物理物体产生的回波被称为杂波。在密集杂乱的环境中,漏检和误报使得跟踪对象成为传统跟踪器(如GNN跟踪器)的一项具有挑战性的任务。在这样的环境中,PHD跟踪器提供了更好的对象估计,因为它可以处理每个传感器的每个对象的多个检测,而无需首先对它们进行聚类。这个例子向您展示了如何在Simulink中使用具有恒定速度模型的高斯混合概率假设密度(GM-PHD)跟踪器跟踪密集杂波中的点目标。金宝app该示例紧跟利用GM-PHD跟踪器跟踪密集杂波中的点目标MATLAB®的例子。
模型概述
load_system (“TrackPointTargetsInDenseClutter金宝appSimulinkExample”);set_param (“TrackPointTargetsInDenseClutter金宝appSimulinkExample”,“SimulationCommand”,“更新”);open_system (“TrackPointTargetsInDenseClutter金宝appSimulinkExample”);
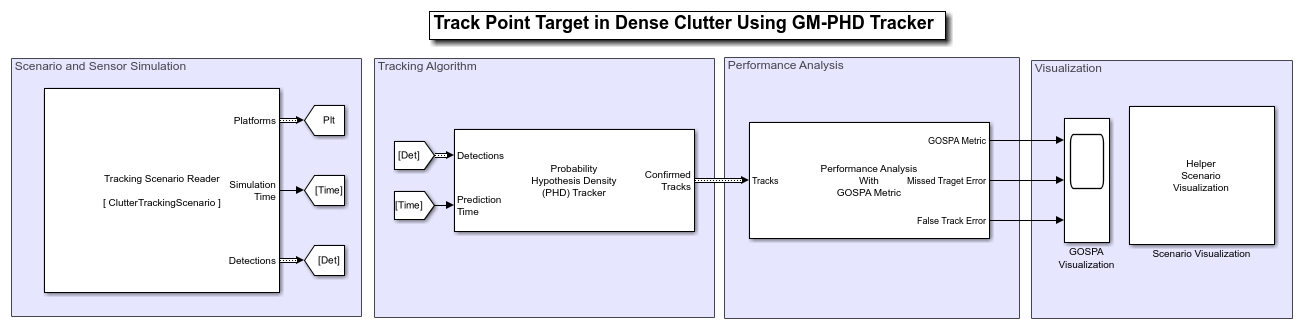
该模型由四个部分组成,每个部分实现工作流程的一部分:
场景与传感器仿真
跟踪算法
性能分析
可视化
场景与传感器仿真
在本例中,场景是使用trackingScenario.该场景由五个以恒定速度移动的点目标组成。你可以使用fusionRadarSensor在场景中模拟雷达探测。目标在传感器的视野内移动。你可以使用FalseAlarmRate属性,以控制杂波的密度。的值FalseAlarmRate属性表示传感器的一个分辨率单元产生假报警的概率。基于的虚警率1 e - 3在这个例子中定义的传感器的分辨率,每一步产生大约53个假警报。本例的场景在helper文件中定义helperCreateClutterTrackingScenario.你可以使用跟踪场景阅读器块从工作区中读取场景对象。配置块以输出检测以及平台姿态和模拟时间。块输出平台的姿态和检测为金宝app仿真软件。公共汽车(金宝app模型)对象。
![]()
跟踪算法
在本例中使用概率假设密度(PHD)跟踪器用gmphd过滤器跟踪目标。配置PHD跟踪器的第一步是定义传感器的配置。将传感器配置定义为具有相同字段的结构trackingSensorConfiguration.你设置SensorIndex的配置为1以匹配模拟传感器的索引。由于传感器是点对象传感器,每次扫描最多对每个对象输出一次检测,因此可以设置MaxNumDetsPerObject配置为1的字段。你假设所有的轨迹都是可探测到的,因此SensorTransformFcn定义为@ x (x, params)而且SensorLimits定义为(负无穷到正无穷)对所有州都适用。你定义ClutterDensity字段,表示传感器的单位体积误报率。你设置FilterInitializationFcn来initcvgmphd,这就创建了一个等速GM-PHD滤波器。您可以从块掩码指定新目标的诞生率,以定义单位时间内在视图中出现的目标的预期数量。用于创建传感器配置的代码定义在helper函数中helperCreateSensorConfig.调用这个函数PreLoadFcn回调。看到模型的回调(金宝app模型)有关回调函数的更多信息。
![]()
性能分析

要评估跟踪器的性能,可以使用广义最优子模式分配度量块。GOSPA指标旨在评估跟踪器的性能,使用分配和距离错误的单一综合得分。GOSPA度量可由下式计算:

在哪里 数字是真实的和吗
数字是真实的和吗 是估计轨道的数量。
是估计轨道的数量。 截断距离是阈值,和
截断距离是阈值,和 轨道和真值之间的基准距离是否由中指定的距离函数计算
轨道和真值之间的基准距离是否由中指定的距离函数计算距离财产。 度规的阶是和
度规的阶是和 是度量的alpha参数,由块掩码定义。
是度量的alpha参数,由块掩码定义。
GOSPA成本越低,跟踪性能越好。值为0表示完美跟踪。您启用GOSPA度量的遗漏目标错误和错误跟踪错误组件作为块输出并可视化它们。在将真值信息传递给GOSPA度量块之前,从真值信息中移除传感器平台。要做到这一点,您可以使用Helper Filter传感器平台帮助程序块,使用MATLAB函数(金宝app模型)块。
可视化
在本例中,GOSPA度量使用范围块进行可视化,而场景使用场景可视化块进行可视化。场景可视化块是使用MATLAB系统(金宝app模型)块。此块的代码在helper类中定义helperClutterTrackingDisplayBlock.块使用RunTimeObject参数来显示它们的输出。看到在模拟中访问块数据(金宝app模型)有关如何在模拟期间访问块输出的进一步信息。

请注意,GOSPA度量在几个步骤后减小。由于每条航迹的建立延迟,GOSPA度量的初始值较高。GOSPA度量结果表明,GM-PHD跟踪器在密集杂乱场景下表现良好,无虚警和零漏迹。
close_system (“TrackPointTargetsInDenseClutter金宝appSimulinkExample”);
总结
在这个例子中,你学习了如何使用PHD跟踪器在Simulink中跟踪密集杂波中的点对象。金宝app您还学习了如何使用GOSPA度量及其相关组件评估跟踪算法的性能。仿真结果表明,GM-PHD跟踪器不会脱靶或产生误报。较低的总体GOSPA分数也表明了理想的跟踪性能。
您也可以从以下列表中选择一个网站: