融合雷达传感器
生成检测和跟踪报告
描述
这融合雷达传感器系统对象™生成目标的检测或跟踪报告。您可以通过该命令指定传感器的检测方式为单站、双站或ESM (electronic support measures)金宝appDetectionMode财产。您可以使用融合雷达传感器模拟随机噪声的群集或未簇的检测,并产生误报检测。您可以使用多目标跟踪器与其他传感器数据和跟踪对象融合生成的检测,例如跟踪器.您还可以直接输出曲目融合雷达传感器目的。要配置目标是否输出为群集检测,未刻录的检测或曲目,请使用targetreportformat.财产。您可以添加融合雷达传感器到平台然后使用雷达跟踪Cenario.
使用单指数模型,雷达计算通过对流层传播引起的距离和高度偏差。距离偏差是指测量的距离大于目标的视线范围。高度偏差是指测量的高度高于它们的真实高度。当雷达和目标之间的视线路径通过较低的高度时,偏差更大,因为这些高度的大气更厚。看参考文献更多细节。
生成雷达探测和跟踪报告:
创造
融合雷达传感器对象并设置其属性。使用参数调用对象,就像调用函数一样。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?.
创造
语法
描述
RDR.= FusionRadarsensor.
RDR.= fusionradarsensor(ID)ID.
RDR.= fusionradarsensor(___那扫描配置)扫描配置.您可以指定扫描配置作为'没有扫描'那“光栅”那“旋转”, 要么“部门”.看方便的语法有关这些配置的更多细节。
RDR.= fusionradarsensor(___那名称,值)radardatagenerator('targetreportformat','track','filterinitializationfcn',@ initcvkf)创建雷达传感器,使用恒定速度线性卡尔曼滤波器初始化的跟踪器生成跟踪报告。
属性
用法
语法
描述
单站检测模式
设置时,这些语法适用DetectionMode财产“单稳态”.
举报=rdr(排放量那emitterconfigs.那simTime)排放量,以及相应发射器的配置,emitterconfigs.这就产生了排放。要启用此语法:
设置
DetectionMode财产“单稳态”.设置
InterferenceInputPort财产错误的.设置
EmissionsInputPort财产真的.
BISTOG或ESM检测模式
当您设置时,此语法适用DetectionMode财产“双基地”要么ESM的.在这两种模式中,targetreportformat.只能是“检测”和检测只能是'传感器球形'.
提供INS输入
当您设置时,此语法适用哈金斯财产真的.
输入参数
输出参数
对象功能
要使用对象功能,请将System Object™指定为第一个输入参数。例如,要发布命名的系统对象的系统资源obj.,使用此语法:
释放(obj)
例子
空中交通管制塔扫描模型
通过指定其平台ID,位置和速度来创建三个目标。
tgt1 = struct('平台',1,...'位置',[0-50e3-1e3],...'速度',[0 900 * 1E3 / 3600 0]);tgt2 = struct('平台'2,...'位置',[20e3 0 -500],...'速度', 700 * 1 e3/3600 0 0);tgt3 =结构('平台',3,...'位置',[-20e3 0-500],...'速度',[300*1e3/3600]);
在离地面15米的地方建立一个机场监视雷达。
rpm = 12.5;fov = (1.4;5);%[方位角;仰角]ScanRate = RPM * 360/60;%deg / supdaterate = scanrate /视场(1);%赫兹传感器= FusionRadarsensor(1,“旋转”那...'updaterate'updaterate,...“安装位置”,[0 0 -15],...'maxazimuthscanrate',scanrate,...“视野”,fov,...“方位角解”,fov(1));
从雷达的全扫描生成探测。
simTime = 0;detBuffer = {};尽管TRUE [DECS,NUMDETS,CONFIG] = SENSOR([TGT1 TGT2 TGT3],SIMTIME);Detbuffer = [Detbuffer;DETS];% #好< AGROW >%是否完全扫描完成?如果config.isscandone.休息%是的结束simTime = simTime + 1/sensor.UpdateRate;结束辐射= [0 0 0];tgtpositions = [tgt1.position;tgt2.Position;tgt3.Position];
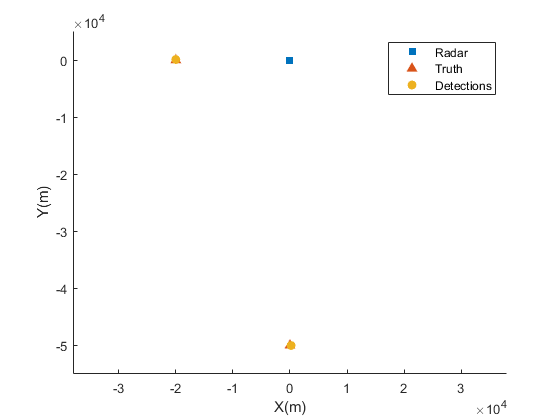
可视化结果。
clr =线(3);图保存在%标绘雷达位置Plot3(雷达旋转(1),射线旋转(2),射线辐射(3),'标记'那'那...'显示名称'那'雷达'那'markerfacecolor'clr (1:)“线条样式”那“没有”)%绘制真理Plot3(TGTPositions(:,1),TGTPositions(:,2),TGTPositions(:,3),'标记'那'^'那...'显示名称'那“真相”那'markerfacecolor':, clr (2),“线条样式”那“没有”)%绘图检测如果~isempty(detBuffer) detPos = cellfun(@(d)d. measurement (1:3),detBuffer,...'统一输出'、假);detPos = cell2mat (detPos ') ';plot3 (detPos (: 1) detPos (:, 2), detPos (:, 3),'标记'那“o”那...'显示名称'那“检测”那'markerfacecolor',clrs(3,:),“线条样式”那“没有”)结束xlabel(“X (m)”)ylabel(“Y (m)”)轴(“平等”) 传奇
检测雷达排放融合雷达传感器
创建一个雷达发射,然后使用融合雷达传感器目的。
首先,创建一个雷达发射。
东方=四元数([180 0 0],“eulerd”那“zyx股票”那“帧”);rfsig =辐射爆发('平台',1,'emitterindex',1,'eirp',100,...“原始位置”,[30 0 0],'方向',东方);
然后,使用创建ESM传感器融合雷达传感器.
传感器= FusionRadarsensor(1,'检测码'那ESM的);
检测RF发射。
时间= 0;[numDets引爆器,配置]=传感器(rfSig、时间)
详细信息=1x1单元阵列{1x1 objectDetection}
numDets = 1
config =.结构体字段:SensorIndex:1 ISValidTime:1 iscandone:0 FieldoFView:[1 5]测量参数:[1x1 struct]
算法
雷达传感器检测模式
这融合雷达传感器系统对象可以模拟三种检测模式:单声道,双孔和电子支撑措施(ESM),如下图所示。金宝app

单站检测模式下,发射机和接收机配置,如图(a)所示。在此模式下,距离测量R.可以表示为R.=R.T.=R.R.哪里R.T.和R.R.分别是从发射器到目标和从目标到接收器的范围。在雷达传感器中,距离测量是R.=CT./ 2,在哪里C是光速和光速T.是信号传输的总时间。除了范围测量之外,单体传感器还可以可选地报告目标的范围率,方位角和高度测量。
对于双晶检测模式,发射器和接收器通过距离分隔L.. 如图(b)所示,信号从发射器发射,从目标反射,然后由接收器接收。双基地测距R.B.被定义为R.B.=R.T.+R.R.-L..在雷达传感器中,通过R.B.=Cδ.T.哪里δ.T.是接收器之间从发射器接收直接信号的时差并从目标接收反射信号。除了双晶的范围测量之外,双体传感器还可以可选地报告目标的双体积速率,方位角和仰角测量。由于双面范围和两个轴承角(方位角和高度)不对应于相同的位置向量,因此不能将它们组合成位置向量并在笛卡尔坐标系中报告。结果,只能在球面坐标系中报告双体传感器的测量。
对于ESM检测模式,接收器只能接收从目标反射的信号或从发射器直接发射,如图(C)所示。因此,唯一可用的测量是目标或发射器的方位角和高度。这些测量只能在球面坐标系中报告。
测量参数
这MeasurementParameters输出检测的属性由一组结构组成,这些结构描述了从子帧到父帧的一系列坐标变换,或逆变换。在大多数情况下,所需的最长转换序列是传感器→ 站台→ 脚本
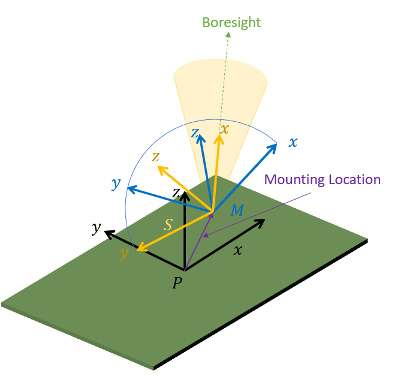
如果检测报告在传感器球坐标和哈金斯设置为错误的,则序列只包含从传感器到平台的一次转换。在这个变换中原始位置与mountinglocation.传感器的特性。这方向由两个连续的旋转组成。第一次旋转,对应于骑士属性,说明从平台框架(P.)到传感器安装架(m)。对应于传感器的方位角和高度角度的第二旋转,用于从传感器安装框架旋转(m)传感器扫描框架(S.). 在S.框架,这X- 反感是阻止方向,和y- 分行在于X-y传感器安装架的平面(m)。
如果哈金斯是真的,转换序列由两个转换组成:首先从场景帧到平台帧,然后从平台帧到传感器扫描帧。在第一次转变中,方向是从场景帧到平台框架的旋转,以及原始位置是平台帧起源的位置相对于方案帧。
如果在平台直角坐标和哈金斯设置为错误的,转换仅由标识组成。
表显示了该字段MeasurementParameters结构体。并非所有字段都必须存在于结构中。具体的字段和其默认值可以取决于传感器的类型。
| 场地 | 描述 |
框架 |
枚举类型,指示用于报告度量的帧。当用直角坐标系报告检测时, |
原始位置 |
子帧的原点相对于父帧的位置偏移,表示为3×1向量。 |
originvelocity. |
子帧的原点相对于父帧的速度偏移,表示为3×1向量。 |
方向 |
3 × 3实值标准正交坐标系旋转矩阵。旋转的方向取决于 |
父母子女 |
一个逻辑标量指示IF |
haselevation. |
指示升高的逻辑标量是否包含在测量中。用于在矩形框架中报告的测量,如果 |
hasazimuth. |
指示逻辑标量,指示在测量中是否包含方位角。 |
hasrange. |
一种逻辑标量,指示测量中是否包含量程。 |
HasVelocity |
指示报告的检测是否包括速度测量值的逻辑标量。用于在矩形框架中报告的测量,如果 |
参考文献
阿明·W·杜瑞地球曲率和大气折射对雷达信号传播的影响。桑迪亚报告SAND2012-10690,桑迪亚国家实验室,阿尔伯克基,NM, 2013年1月。https://prod.sandia.gov/techlib-noauth/access-control.cgi/2012/1210690.pdf。
[2] 多利,阿明W.“合成孔径雷达的运动测量。“桑迪亚报告SAND2015-20818,桑迪亚国家实验室,阿尔伯克基,新墨西哥州,2015年1月。https://pdfs.semanticscholar.org/f8f8/cd6de8042a7a948d611bcfe3b79c48aa9dfa.pdf.
您还可以从以下列表中选择一个网站: