时间序列预测和预测预后
这个例子显示了如何创建一个时间序列模型,并使用模型进行预测,预测和状态估计。测得的数据是从一个感应炉,其时隙大小溶蚀随时间。所述时隙大小不能直接测量,但在炉的电流和消耗的功率进行测量。已知的是,作为所述时隙大小的增加,槽电阻降低。平方以测得的功率测量的电流的比率是正比于所述槽的大小。可以使用测量的电流 - 功率比(电流和功率测量是有噪声的)来创建一个时间序列模型,并使用模型来估计当前时隙大小和预测未来的时隙大小。通过物理检查感应炉时隙大小在时间上在某些点是已知的。
加载和绘制测量数据
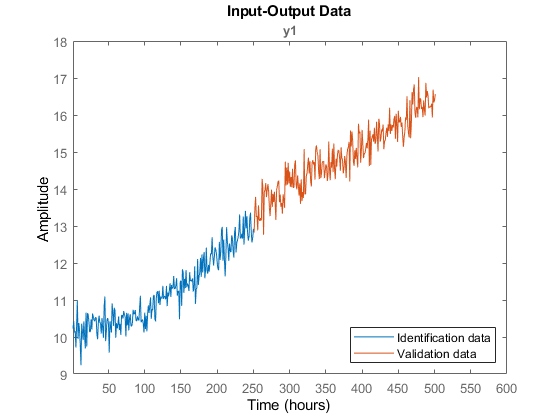
所测量的电流 - 功率比数据被存储在iddata_TimeSeriesPredictionMATLAB文件。数据在每小时间隔和显示测量为表示炉槽的侵蚀随时间的比率增加。您开发使用该数据的时间序列模型。由数据分离成识别和验证段开始。
加载iddata_TimeSeriesPredictionN = numel(Y);NS =地板(N / 2);y_id = Y(1:NS,:);y_v = Y((NS + 1:结束),:);data_id = IDDATA(y_id,[]中,Ts,'TIMEUNIT','小时');data_v = IDDATA(y_v,[]中,Ts,'TIMEUNIT','小时',“T开始”,NS + 1);图(data_id,data_v)传说(“标识数据”,“验证数据”,'位置','东南');
型号识别
槽侵蚀可以被建模为具有噪声输入和测量的电流 - 功率比作为输出的状态空间系统。所测量的电流 - 功率比正比于系统的状态,或


哪里 状态矢量,包含时隙大小;
状态矢量,包含时隙大小; 是所测量的电流 - 功率比;
是所测量的电流 - 功率比; 噪声和
噪声和 将被识别。
将被识别。
使用ssest()命令到从测量数据识别离散的状态空间模型。
SYS = ssest(data_id,1,'TS',TS,'形成','典范')
SYS =离散时间识别出的状态空间模型:X(t + TS)= A X(t)+ K E(t)的Y(吨)= C X(t)+ E(t)的A = X1 X1 1.001Ç= X1 Y1 1 K = Y1 X1 0.09465采样时间:1小时参数化:规范形式具有索引:1.干扰成分:自由系数的估计数:2使用 “idssdata”, “getpvec”, “getcov” 为参数和它们的不确定度。状态:使用SSEST时域数据“data_id”估算。适合于估计数据:67.38%(预测焦点)FPE:0.09575,MSE:0.09348
所识别的模型最小化了1步提前预测。使用10领先一步预测器验证该模型,即,给定 使用模型预测
使用模型预测 。需要注意的是所测量的值和预测值之间的误差,
。需要注意的是所测量的值和预测值之间的误差, ,是用来做预测。
,是用来做预测。
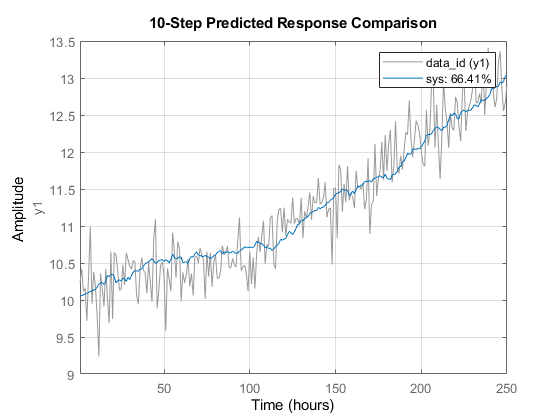
使用10提前一步预测的识别数据和独立的验证数据。
n步= 10;比较(SYS,data_id,n步)10步预测的%比较估计数据网格('上');
数字;比较(SYS,data_v,n步)%比较验证数据网格('上');
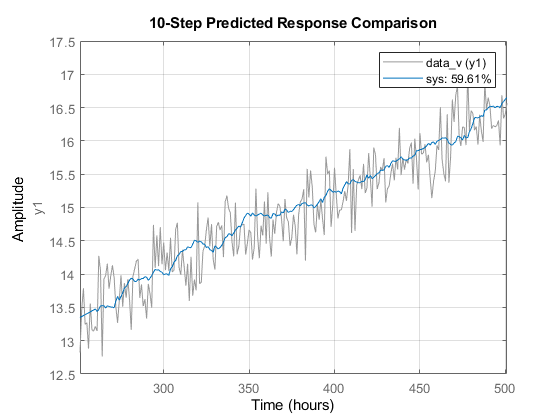
上述两种运动数据组显示,预测器所测量的数据相匹配。
预测用于进一步验证模型。预测使用测量的数据记录 以计算在时间步骤n中的模型状态。该值被用作初始条件为预测为将来的时间跨度中的模型响应。我们预计在验证数据的时间跨度模型响应,然后比较这两个。我们也可以计算在预报的不确定性和绘制+/- 3 SD它们的值。
以计算在时间步骤n中的模型状态。该值被用作初始条件为预测为将来的时间跨度中的模型响应。我们预计在验证数据的时间跨度模型响应,然后比较这两个。我们也可以计算在预报的不确定性和绘制+/- 3 SD它们的值。
MeasuredData = IDDATA(Y,[]中,Ts,'TIMEUNIT','小时');(%)= [data_id; data_v]T0 = MeasuredData.SamplingInstants;地平线=尺寸(data_v,1);%预测地平线[YF,〜,〜,yFSD] =预测(SYS,data_id地平线);%注:YF是IDDATA对象而yFSD是双载体T = yF.SamplingInstants;%提取时间样本yFData = yF.OutputData;%提取响应如双载体图(MeasuredData)保持上图(T,yFData,'r.-',T,yFData + 3 * yFSD,'R--',T,yFData-3 * yFSD,'R--')保持离标题(的时间跨度“在验证数据预测的响应”)网格上
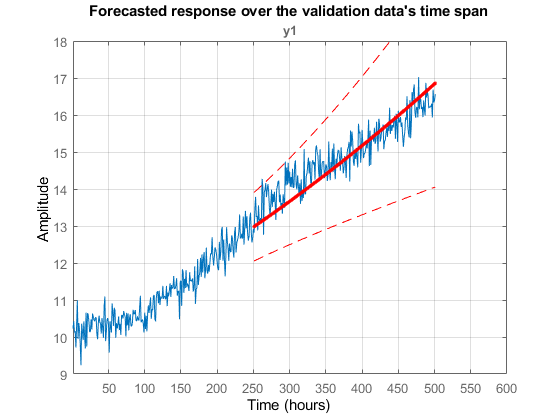
该图显示,与置信区间模型响应(由红色着色虚曲线表示)重叠的验证数据的测量值。将合并的预测和预测结果表明,该模型代表测得的电流 - 功率比。
预测结果还表明,在大视野模型的方差较大,为了实用的目的未来的预测应限于短期的视野。用于感应炉模型200小时地平线是适当的。
最后,我们用模型来预测响应为502-701小时的时间跨度200步到未来。
地平线= 200;%预测地平线[yFuture,〜,〜,yFutureSD] =预测(SYS,MeasuredData地平线);T = yFuture.SamplingInstants;%提取时间样本yFutureData = yFuture.OutputData;%提取响应如双载体图(T0,Y,...T,yFutureData,'r.-',...吨,yFutureData + 3 * yFutureSD,'R--',...吨,yFutureData-3 * yFutureSD,'R--')标题(“预测响应(200步)”)网格上
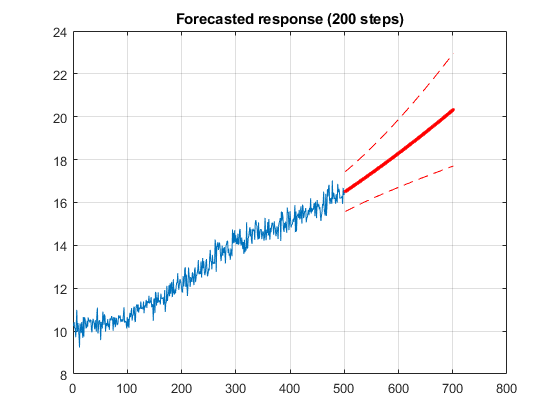
蓝色曲线表示所测量的数据跨越1-501小时。红色曲线为超出测量数据的时间范围200小时预测响应。红色虚曲线示出了基于所识别的模型的随机抽样在预测响应中的3 SD的不确定性。
状态估计
所识别的模型中的测量的电流 - 功率比相匹配,但我们感兴趣的是在炉槽尺寸,该尺寸在模型中的状态。所识别的模型具有可转化的,使得状态已经意,在这种情况下,槽的大小的任意的状态。
创建任意状态的预测。辨识模型协方差需要被翻译使用的预测模型translatecov()命令。该createPredictor()函数简单地提取的第三输出参数预测()与其一起使用的功能translatecov()。
类型createPredictorEST = translatecov(@(S)createPredictor(S,data_id),SYS)
预解码功能= createPredictor(MDL,数据)%CREATEPREDICTOR返回1-领先一步预测器。%%SYS = createPredictor(MDL,数据)%%创建指定的模型MDL%和测量的数据的1领先一步预测器模型SYS。该功能使用%| TimeSeriedPredictionExample |和| translatecov()|命令%转化辨识模型协方差预测。%版权所有2015 MathWorks公司[〜,〜,预解码值] =预测(MDL,数据,1);EST =离散时间识别出的状态空间模型:X(t + TS)= A X(t)+ B u(t)的Y(吨)= C X(t)+ d U(t)的A = X1 X1 0.9064B = Y1 X1 0.09465 C = X1 Y1 1 d = Y1 Y1 0采样时间:1小时参数化:规范形式具有索引:1.穿心:无干扰成分:自由系数的无数:2使用 “idssdata”, “getpvec”“getcov”为参数及其不确定性。状态:创建者直接建设或改造。未估计。
该模型美东时间是1领先一步预测器在相同的状态坐标原始模型表达SYS。我们如何改变状态坐标,使模型的状态对应于(与时间有关)插槽的大小?该解决方案是依靠间歇截取的槽尺寸的实际的,直接的测量。这是在实践中没有地方采取直接测量成本高,只有定期进行(如组件被替换时)少见。
具体而言,变换预测器状态,, 至 , 以便
, 以便 哪里所测量的电流 - 功率比,和是在炉槽的大小。在这个例子中,炉槽尺寸的四个直接测量,
哪里所测量的电流 - 功率比,和是在炉槽的大小。在这个例子中,炉槽尺寸的四个直接测量,sizeMeasured和炉当前功率比,ySizeMeasured,用于估计 。在转型中预测预测协方差也需要进行改造。因此,我们使用
。在转型中预测预测协方差也需要进行改造。因此,我们使用translatecov()命令执行国家坐标变换。
Cnew = sizeMeasured \ ySizeMeasured;EST = translatecov(@(S)ss2ss(S,S.C / Cnew),EST)
EST =离散时间识别出的状态空间模型:X(t + TS)= A X(t)+ B u(t)的Y(吨)= C X(t)+ d U(t)的A = X1 X1 0.9064B = Y1 X1 0.9452 C = X1 Y1 0.1001 d = Y1 Y1 0采样时间:1小时参数化:规范形式具有索引:1.穿心:无干扰成分:自由系数的无数:2使用 “idssdata”, “getpvec”“getcov”为参数及其不确定性。状态:创建者直接建设或改造。未估计。
该预测现在是在理想状态坐标来表示。它有一个输入端,是测得的系统输出(炉电流 - 功率比)和一个输出,该输出的预测系统输出(炉时隙大小)。预测器是模拟来估计系统输出和系统状态。
OPTS = simOptions;opts.InitialCondition = sizeMeasured(1);U = IDDATA([],[data_id.Y; data_v.Y],TS,'TIMEUNIT','小时');[你们,ye_sd,XE] = SIM(EST,U,OPTS);
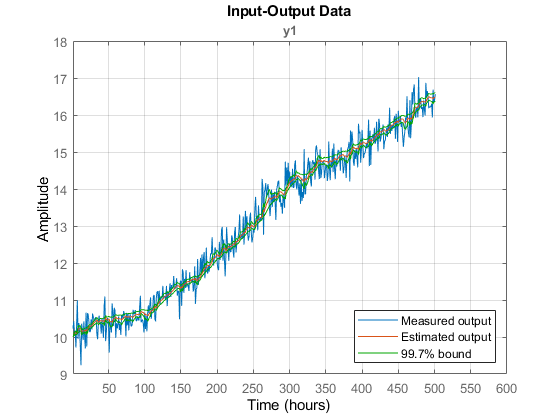
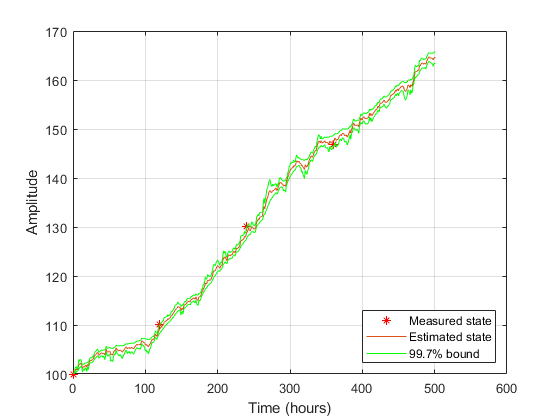
比较测量和已知值估计的输出和位尺寸。
yesdp =你们;yesdp.Y = ye.Y + 3 * ye_sd;yesdn =你们;yesdn.Y = ye.Y-3 * ye_sd;N = numel(XE);图中,图([data_id; data_v],咋,yesdp,'G',yesdn,'G')图例(“测量输出”,“预计产出”,'99 0.7%结合的”,'位置','东南')网格('上')图,图(tSizeMeasured,sizeMeasured,'R *',1:N,XE,1:N,yesdp.Y / est.C,'G',1:N,yesdn.Y / est.C,'G');传说(“测量的状态”,“估计状态”,'99 0.7%结合的”,'位置','东南')xlabel(“时间(小时)”)ylabel('振幅');网格('上')
使用预测预报及预后
预测模型和预测的结合使我们能够在感应炉进行预后。
预测模型使我们能够估计基于测量的数据中的当前炉位尺寸。如果估计值处于或接近临界值的检查或维护可被调度。预测可以让我们从估计的当前状态,预测未来的系统行为,使我们能够预测何时可能需要检查或维护。
进一步的预测值和预测模型可以被重新确定为更多的数据变得可用。在这个例子中一个数据组被用来确定所述预测和预测模型但随着越来越多的数据被蓄积的模型可以被重新识别。
也可以看看
相关话题
您还可以选择从下面的列表中的网站: