预测
鉴定预测模型输出
句法
描述
例子
预测未来值正弦信号
预测使用AR模型的正弦信号的值。
生成和绘图数据。
数据= IDDATA(SIN(0.1 * [1:100])”,[]);图(数据)

适合的AR模型正弦波。
SYS = AR(数据,2);
在给定的时间范围内预测未来的值。
K = 100;P =预测(SYS,数据,K);
ķ指定预测时间范围为100个样本。p是预测的模型响应。
画出预测数据。
图(数据,'B',P,'R'),图例(“测量”,“预测”)

另外,使用语法绘制预测输出预测(sys、数据、K)。
时间序列模型的预测响应
获得过去的数据,并确定一个时间序列模型。
加载iddata9Z9past_data = z9.OutputData(1:50);模型= AR(z9,4);
Z9是一个iddata仅包含测量输出的对象。
模型是一个idpoly时间序列模型。
指定预测初始条件。
选择= forecastOptions(“InitialCondition”,'E');
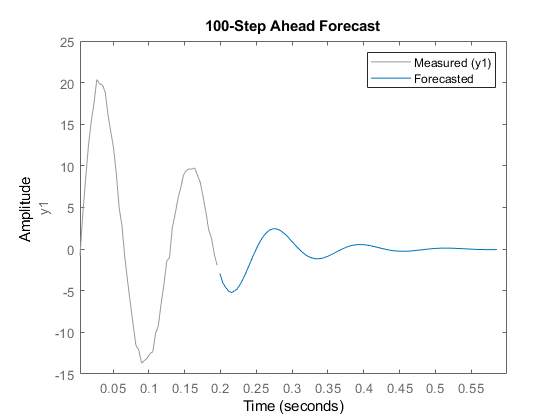
绘制给定时间范围内的预测系统响应。
K = 100;预测(模型、past_data K,选择);传说(“测量后”,“预测”)
剧情预测输出与指定的线路类型
获得过去的数据,并确定一个时间序列模型。
加载iddata9Z9past_data = z9.OutputData(1:50);模型= AR(z9,4);
Z9是一个iddata仅包含测量输出的对象。
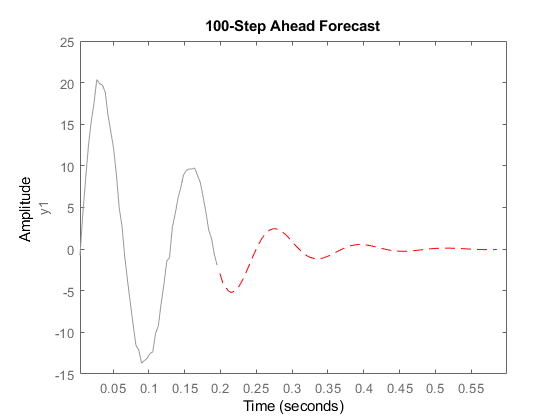
将给定时间范围内的预测系统响应绘制为一条红色虚线。
K = 100;预测(模型,'R--',past_data,K);
该地块也默认设置为显示过去的数据。要更改显示选项,右键单击阴谋访问上下文菜单。例如,以查看预测输出的估计的标准偏差,选择ConfidenceRegion从上下文菜单中。要指定标准偏差积数,双击该地块,并打开属性编辑器对话框。在该对话框中,在选项中,指定标准差的个数置信区域已确定模型。默认值是1标准偏差。
预测模型响应为已知的未来输入
获得过去的数据,未来的输入和识别的线性模型。
加载iddata1Z1Z1 = IDDATA(cumsum(z1.y),cumsum(z1.u),z1.Ts,“InterSample”,'FOH');past_data = Z1(1:100);future_inputs = z1.u(101:结束);SYS = polyest(Z1,[2 2 2 0 0 1],'IntegrateNoise',真正);
Z1是一个iddata对象,其中包含集成的数据。SYS是一个idpoly模型。past_data包含的第一100个数据点Z1。
future_inputs包含最后200个数据点Z1。
预测系统响应到未来对于一个给定的时间跨度和未来的投入。
K = 200;[YF,X0,sysf,yf_sd,X,x_sd] =预测(SYS,past_data,K,future_inputs);
YF是预测模型响应,并yf_sd是输出的标准偏差。X0是所估计值的初始状态,和sysf是预测状态空间模型。也恢复是状态轨迹,X和轨迹的标准偏差,x_sd。
绘制预测响应。
UPPERBOUND = IDDATA(yf.OutputData + 3 * yf_sd,[],yf.Ts,“T开始”,yf.Tstart);下界= IDDATA(yf.OutputData-3 * yf_sd,[],yf.Ts,“T开始”,yf.Tstart);情节(past_data (:,: []), yf (:,: []), UpperBound,'K--',下界,'K--')({传奇“测量后”,“预测”,'3 SD不确定性'},'位置','最好')

绘制状态轨迹。
t = z1.SamplingInstants(101:结束);次要情节(1,1)情节(t) x (: 1), t, x (: 1) + 3 * x_sd (: 1),'K--',T,X(:,1)-3 * x_sd(:,1),'K--')标题('X_1')副区(3,1,2)情节(T,X(:,2),T,X(:,2)+ 3 * x_sd(:,2),'K--',T,X(:,2)-3 * x_sd(:,2),'K--')标题('X_2')副区(3,1,3)情节(T,X(:,3),T,X(:,3)+ 3 * x_sd(:,3),'K--',T,X(:,3)-3 * x_sd(:,3),'K--')标题('X_3')
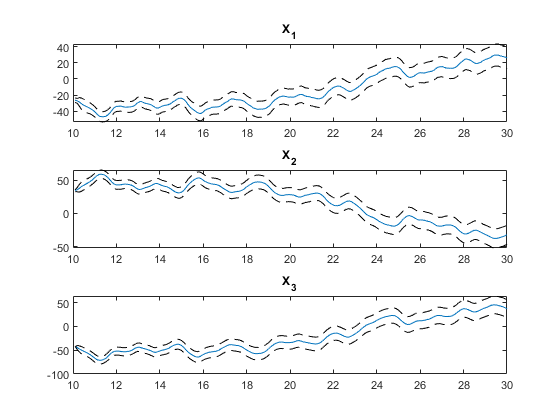
响应的不确定性不长了,因为未来的输入规格的预测时间跨度。
多输出非线性时间序列模型的预测响应
加载数据。
负载(fullfile (matlabroot'工具箱','IDENT','iddemos','数据','predprey2data'));Z = IDDATA(Y,[],0.1);集(Z,“T开始”,0,'OutputUnit'{“人口(千)”,...“人口(千)”},“TimeUnit”,'年份');
ž是从1捕食1 - 食饵人口的两所输出的时间序列数据组(无输入)。人口呈现出由于拥挤在捕食者的下降。该数据集包含占地20多年的演变201个的数据样本。
在捕食(这些变化Y1)和猎物(Y2)群体可以被表示为:
在捕食者和猎物种群的非线性可以使用自定义回归系数非线性ARX模型是合适的。
该数据作为过去数据的使用部分。
past_data = Z(1:100);
指定标准回归量。
NA = [1 0;0 1];NB = [];NK = [];
指定自定义回归量。
C = {{'Y1(T-1)* Y2(T-1)'}; {'Y1(T-1)* Y2(T-1)','Y2(T-1)^ 2'}};
使用估计非线性ARX模型past_data作为估计数据。
SYS = nlarx(past_data,[NA NB NK]“wavenet”,'CustomRegressors',C);
比较的模拟输出SYS用测得的数据,以确保它是一个良好的配合。
比较(past_data,SYS);

绘制预测输出SYS。
预测(SYS,past_data,101);传说(“测量后”,“预测”);

重现预测结果由模拟
获取过去的数据,未来的输入,并确定线性模型。
加载iddata3Z3past_data = Z3(1:100);future_inputs = z3.u(101:结束);SYS = polyest(Z3,[2 2 2 0 0 1]);
预测系统响应到未来对于一个给定的时间跨度和未来的投入。
K =尺寸(future_inputs,1);[YF,X0,sysf] =预测(SYS,past_data,K,future_inputs);
YF是预测模型响应,X0是所估计值的初始状态,和sysf是预测状态空间模型。
与输入模拟预测状态空间模型,future_inputs以及初始条件,X0。
选择= simOptions;opt.InitialCondition = X0;YS = SIM(sysf,future_inputs(1:K),选择);
绘制预测和模拟输出。
T = yf.SamplingInstants;图(T,yf.OutputData,'B'、t、y'.R');传说(“预测输出”,“模拟输出”)
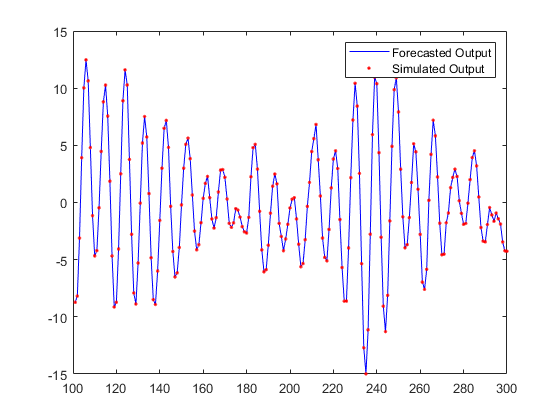
预测模型模拟,sysf,具有输入,future_inputs以及初始条件,X0,产生预测的输出,YF。
输入参数
输出参数
提示
右键单击该绘图将打开上下文菜单,您可以在其中访问以下选项:
系统- 查看选择系统预测的输出。默认情况下,所有系统的预测输出绘制。
实验数据- 仅多的实验数据。切换从不同的实验数据之间。
特点-查看以下数据特征:
峰值-查看峰值的数据。
平均值-查看数据的平均值。
置信区间- 查看预测产量的估计的标准偏差。要指定标准偏差积数,双击该地块,并打开属性编辑器对话框。指定标准偏差数选项选项卡,在置信区域已确定模型。默认值是
1标准偏差。不是为非线性ARX和汉默斯坦 - 维纳模型和模型不包含参数协方差信息产生信赖区域。
显示过去的数据- 绘制用于预测在过去的输出数据。默认情况下,过去的输出数据绘制。
I / O分组- 对于含有多于一个输入或输出通道的数据集。选择对剧情输入和输出通道的分组。
没有一个- 在自己单独的轴绘图输入 - 输出信道。
所有- 组中的所有输入通道一起,所有输出通道在一起。
I / O选择器- 对于含有多于一个输入或输出通道的数据集。选择输入和输出通道,以情节的子集。默认情况下,所有输出通道绘制。
格- 添加网格的情节。
正常化- 规范化y标尺在剧情的所有数据。
完整视图-返回全视图。默认情况下,图被缩放为全视图。
属性- 打开属性编辑器对话框自定义情节属性。
介绍了在R2012a
您还可以选择从下面的列表中的网站: