armax
利用时域数据估计ARMAX、ARIMAX、ARMA或ARIMA模型的参数
语法
描述
估计ARMAX模型
sys=armax(数据,[na nb nc nk])idpoly模型sys采用预测误差法和中规定的多项式阶数[na nb nc nk].模型属性包括估计协方差(参数不确定性)和估计数据与实测数据之间的拟合优度。
估计初始条件
[将估计的初始条件作为sys,集成电路) = armax (___)initialCondition对象。如果计划使用相同的估计输入数据模拟或预测模型响应,然后将响应与相同的估计输出数据进行比较,请使用此语法。在模拟的第一部分中,合并初始条件会产生更好的匹配。
例子
估计ARMAX模型
估计一个ARMAX模型,并查看模型输出对估计数据的拟合情况。
将测量数据加载到iddata对象z2.
负载iddata2z2
估计一个二阶ARMAX模型 , 和 多项式和一个样本周期的传输延迟。
na = 2;nb = 2;数控= 2;nk = 1;Sys = armax(z2,[na nb nc nk])
sys =离散ARMAX模型:一个(z) y (t) = B (z) u (t) + C (z) e (t) (z) = 1 - 1.512 z ^ 1 + 0.7006 z ^ 2 B (z) = -0.2606 z ^ 1 + 1.664 z ^ 2 C (z) = 1 - 1.604 z ^ 1 + 0.7504 z ^ 2样品时间:0.1秒参数化:多项式订单:na = 2 nb = 2数控= 2 nk = 1很多免费的系数:6使用“polydata”、“getpvec”、“getcov”表示参数及其不确定性。状态:在时域数据“z2”上使用ARMAX估计。拟合估计数据:85.89%(预测焦点)FPE: 1.086, MSE: 1.054
输出显示了包含估计参数和估计细节的多项式。下状态,拟合估计数据结果表明,估计模型具有一步超前的预测精度,在80%以上。
将模型模拟输出与测量数据进行比较。
比较(z2 sys)
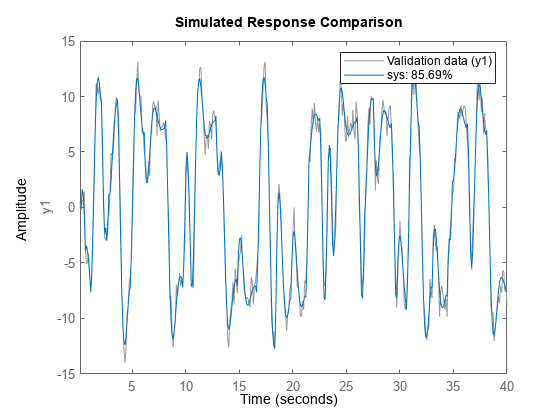
模拟模型与实测数据的拟合与估计拟合基本一致。
ARMA模型
估计一个ARMA模型,并将其响应与测量输出和AR模型进行比较。
加载包含时间序列的数据z9有噪音。
负载iddata9z9
用一阶估计四阶ARMA模型 多项式。
na = 4;数控= 1;Sys = armax(z9,[na nc]); / /设定时间
估计一个四阶AR模型。
sys_ar = ar (z9, na);
将模型输出与测量数据进行比较。
比较(z9 sys sys_ar)
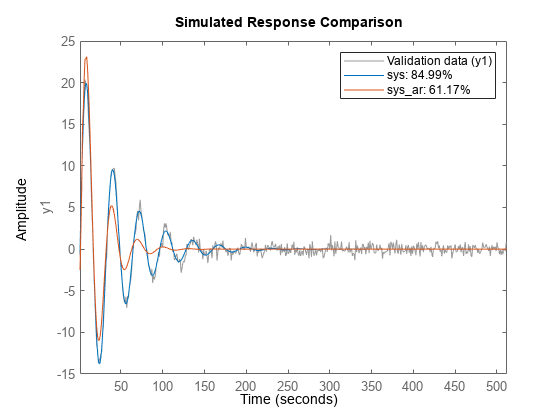
ARMA模型对数据拟合较好。
指定评估选项
从测量数据估计一个ARMAX模型,并指定估计选项。
加载数据并创建iddata初始化选项集选择,并设置选项焦点,搜索方法,MaxIterations和显示.然后使用更新后的选项集估计ARMAX模型。
负载twotankdata;z = iddata (y、u, 0.2);选择= armaxOptions;opt.Focus =“模拟”;opt.SearchMethod =“lm”;opt.SearchOptions.MaxIterations = 10;opt.Display =“上”;Sys = armax(z,[2 2 2 1],opt);
progress viewer中显示的模型的测量组件的终止条件是已达到最大迭代次数。
要改进结果,请使用更大的MaxIterations,或按如下方式在先前估计的模型上继续迭代:
sys2=armax(z,sys);比较(z,sys,sys2)
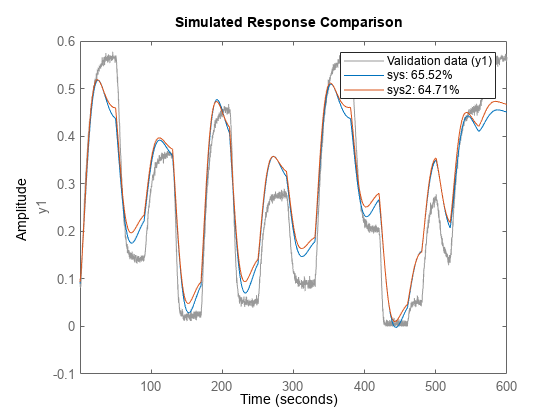
在哪里sys2细化的参数sys提高对数据的拟合。
正则化的ARMAX模型
通过转换正则化ARX模型来估计正则化ARMAX模型。
加载数据。
负载正则化ExampleData.matm0simdata;
估计一个30阶的非正则化ARMAX模型。
M1 = armax(m0simdata(1:150),[30 30 30 1]);
通过试错确定Lambda值来估计一个正则化的ARMAX模型。
opt=armaxOptions;opt.Regularization.Lambda=1;m2=armax(m0simdata(1:150),[30 1],opt);
通过转换正则化ARX模型,然后进行降阶,获得低阶ARMAX模型。
opt1 = arxOptions;[L,R] = arxRegul(m0simdata(1:150),[30 30 1];opt1.Regularization。λ= L;opt1.Regularization。R = R;M0 = arx(m0simdata(1:20 0),[30 30 1],opt1);= idpoly先生(balred (ids (m0), 7));
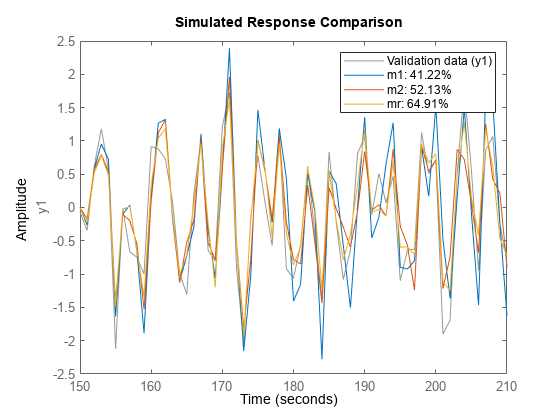
将模型输出与数据进行比较。
opt2=比较选项(“InitialCondition”,“z”);比较(m0simdata(150:结束),m1, m2,先生,opt2);
ARIMA模型
估计单变量时间序列数据的四阶ARIMA模型。
加载包含带有噪声的时间序列的数据。
负载iddata9z9;
对输出信号进行积分,用结果代替原来的输出信号z9.
z9.y=总和(z9.y);
用一阶估计四阶ARIMA模型
多项式通过设置“一体化””“对符合事实的.
模型= armax(z9,[4 1],“IntegrateNoise”,真正的);
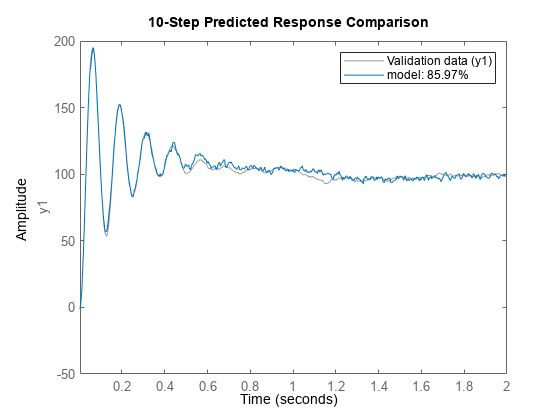
使用10步预测预测模型输出,并将预测输出与估计数据进行比较。
比较(z9、模型、10)
迭代估计ARMAX模型
根据实测数据迭代估计不同阶次的ARMAX模型。
负载dryer2数据并执行多项式阶数组合的估计na,铌,数控,输入延迟nk.
负载dryer2;z = iddata (y2, u2, 0.08,“Tstart”, 0);na = 2:4;数控= 1:2;nk = 0:2;模型=单元(18);ct = 1;为i=1:3 na_u=na(i);nb=na;为j=1:2nc_u2;=nc(j);为K = 1:3 nk_ = nk(K);模型{ct} = armax(z,[na_ nb_ nc_ nk_]);ct = ct + 1;结束结束结束
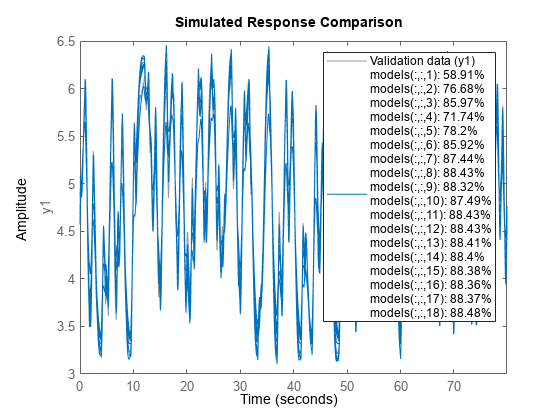
堆叠估计模型,并将其模拟响应与估计数据进行比较z.
模型=堆栈(1、模型{:});比较(z,模型)
使用状态空间模型初始化ARMAX模型参数
加载估算数据。
负载iddata2z2
从估计数据估计一个阶3的状态空间模型。
sys0 = n4sid (z2, 3);
使用先前估计的状态空间模型来初始化参数,估计一个ARMAX模型。
sys=armax(z2,sys0);
获得初始条件
加载数据。
负载iddata1icz1i
估计一个二阶ARMAX模型sys并返回中的初始条件集成电路.
na=2;nb=2;nc=2;nk=1;[sys,ic]=armax(z1i[na-nb-nc-nk]);ic
A: [2x2 double] X0: [2x1 double] C: [0 1] Ts: 0.1000
集成电路是一个initialCondition对象的自由响应sys的初始状态向量X0.你可以把集成电路当你模拟sys与z1i输入信号,比较响应与z1i输出信号。
输入参数
输出参数
更多关于
算法
迭代搜索算法最小化鲁棒二次预测误差准则。当下列任何一项为真时,迭代将终止:
达到最大迭代次数。
预期的改进小于规定的公差。
找不到更低的标准值。
您可以使用系统报告终止.
使用armaxOptions选项集,用于创建和配置影响评估结果的选项。特别是,设置搜索算法属性,例如MaxIterations和宽容,使用“SearchOptions”财产。
当您不指定迭代搜索的初始参数值作为初始模型时,它们将在一个特殊的四阶段LS-IV算法中构造。
鲁棒性的截止值是基于先进。ErrorThreshold估计选项和关于估计标准差的残差从初始参数估计。在最小化过程中不重新计算截止值。默认情况下,不执行增强;的默认值ErrorThreshold选择是0。
为了保证只测试稳定预测器对应的模型,算法对预测器进行了稳定性测试。一般来说,两个 和 (如果适用)必须在单位圆内全部为零。
最小化信息显示在屏幕上时,估计选项“显示”是“上”或“满”.当“显示”是“满”,当前和以前的参数估计都以列向量形式显示,参数按字母顺序列出。给出了准则函数(代价)的值,并给出了高斯-牛顿向量及其范数。当“显示”是“上”,则只显示标准值。
选择
armax不支持连续时间模型金宝app估计。使用特遣部队估计一个连续时间传递函数模型,或ssest估计一个连续时间状态空间模型。
armax金宝app仅支持时域数据。对于频域数据,请使用oe估计一个输出误差(OE)模型。
参考文献
[1] Ljung, L。系统识别:用户的理论,第二版。上鞍河,NJ: Prentice-Hall PTR, 1999。参见计算估计的章节。
扩展功能
您还可以从以下列表中选择网站: