sim卡
模拟辨识模型的响应
语法
描述
sim卡(___)绘制识别模型的模拟响应图。
例子
使用输入数据模拟状态空间模型
加载估计数据。
负载iddata2z2
估计一个三阶状态空间模型。
sys = ss (z2, 3);
使用来自估计数据的输入通道模拟识别的模型。
y = sim (sys、z2);
在模拟模型响应中添加噪声
加载数据,并获得识别的模型。
负载iddata2z2sys = n4sid (z2, 3);
sys是用子空间方法估计的三阶状态空间模型。
创建模拟选项集,以向模拟模型响应添加噪声。
opt1 = simOptions (“AddNoise”,真正的);
模拟模型。
y = sim (sys、z2 opt1);
默认高斯白噪声通过模型的噪声传递函数进行滤波,并添加到仿真模型响应中。
你也可以添加自己的噪声信号,e,使用NoiseData选择。
e = randn(长度(z2.u), 1);opt2 = simOptions (“AddNoise”,真的,“NoiseData”, e);
模拟模型。
y = sim (sys、z2 opt2);
使用估算过程中获得的初始条件模拟模型
加载数据。
负载iddata1z1
指定估计选项来估计初始状态。
estimOpt = ssestOptions (“InitialState”,“估计”);
估计一个状态空间模型,并返回估计的初始状态的值。
[sys, x0] = ss (z1 2 estimOpt);
指定模拟的初始条件
simOpt = simOptions (“InitialCondition”, x0);
对模型进行仿真,得到模型响应和标准差。
[y, y_sd] = sim (sys, z1, simOpt);
状态空间模型的标准差和状态轨迹估计
负载估计数据,并估计一个状态空间模型。
负载iddata1z1sys = ss (z1, 2);
返回标准偏差和状态轨迹。
[y y_sd x] = sim (sys, z1);
估计模拟响应的状态轨迹和标准差
负载估计数据,并估计一个状态空间模型。
负载iddata1z1sys = ss (z1, 2);
创建模拟选项集,并指定初始状态。
选择= simOptions (“InitialCondition”[1, 2]);
指定初始状态的协方差。
opt.X0Covariance = [0.1 0;0 0.1);
计算模拟响应的标准差,y_sd,状态轨迹,x_sd.
[x, y, y_sd x_sd] = sim (sys, z1,选择);
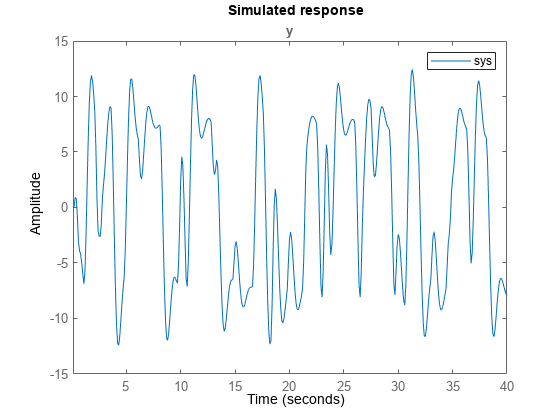
图模拟模型响应
获取识别的模型。
负载iddata2z2sys =特遣部队(z2, 3);
sys是一个idtf模型,它封装了对测量数据估计的三阶传递函数z2.
模拟模型。
sim (sys、z2)
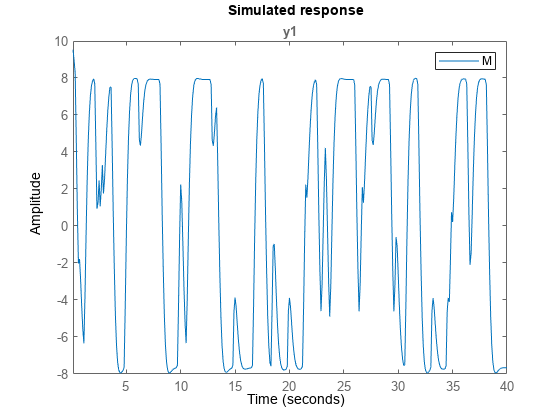
模拟非线性ARX模型
在已知的平衡点附近模拟一个单输入单输出的非线性ARX模型,输入水平为1的输出水平10.
加载示例数据。
负载iddata2
从数据估计一个非线性ARX模型。
M = nlarx(z2,[2 2 1],“idTreePartition”);
根据过去的数据估计模型的当前状态。在输入和输出变量(这里是2)有滞后时指定尽可能多的过去的样本。
x0 = data2state (M,结构(“输入”的(1),“输出”10 * 1 (2, 1)));
使用返回的初始状态来模拟模型data2state.
选择= simOptions (“InitialCondition”, x0);sim (M, z2,选择)
从上一个模拟的结束继续
在前一次仿真运行结束后,继续对非线性ARX模型进行仿真。
从数据中估计一个非线性ARX模型。
负载iddata2M = nlarx(z2,[2 2 1],idTreePartition);
使用输入数据的前半部分模拟模型z2.从零初始状态开始模拟。
u1 = z2(1∶[]);opt1 = simOptions (“InitialCondition”,“零”);ys1 = sim (M, u1, opt1);
使用输入数据的后半部分启动另一个模拟z2.使用与第一次模拟结束时相同的模型状态。
u2 = z2(201:最终,[]);
要正确设置第二次模拟的初始状态,请使用包输入u1和输出ys1从第一次模拟到第一次iddata对象。将此数据作为下一次模拟的初始条件传递。
firstSimData = (ys1, u1);opt2 = simOptions (“InitialCondition”, firstSimData);ys2 = sim (M, u2, opt2);
通过与使用所有输入数据的完整仿真进行比较,验证两个仿真z2.首先,提取整个输入数据集。
uTotal = z2 (:, []);opt3 = simOptions (“InitialCondition”,“零”);ysTotal = sim (M, uTotal, opt3);
绘制三个回应ys1,ys2和ysTotal。ys1应该等于ysTotal.ys2应该等于的后半部分ysTotal.
情节(ys1“b”ys2,‘g’ysTotal,“k *’)
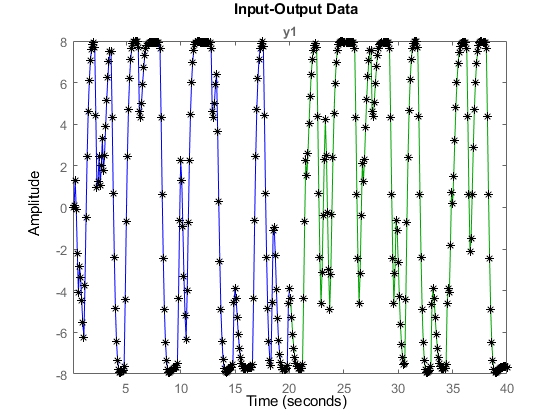
图中显示了三种反应ys1,ys2,ysTotal重叠。
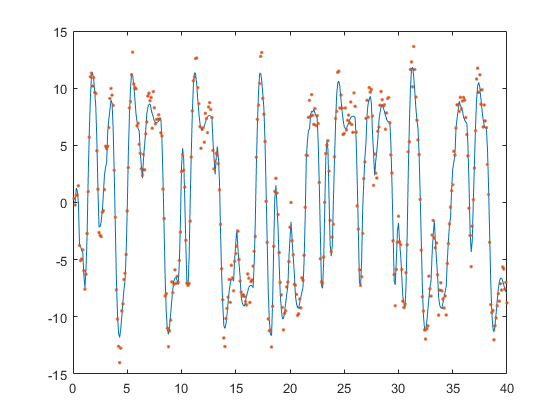
将模型响应匹配到输出数据
估计模型的初始状态米这样,响应与数据集中的输出最匹配z2.
加载示例数据。
负载iddata2;
从数据估计一个非线性ARX模型。
M = nlarx(z2,[4 3 2],idWaveletNetwork(“NumberOfUnits”, 20));
估计的初始状态米到最适合z2.y在模拟响应中。
x0 = findstates (M, z2,正);
模拟模型。
选择= simOptions (“InitialCondition”, x0);ysim = sim (M, z2.u,选择);
比较仿真模型输出ysim输入输出信号z2.
时间= z2.SamplingInstants;情节(时间、ysim时间、z2.y“。”)
模拟已知输入未知输出的近稳态模型
开始对输入已知的稳态附近的模型进行模拟1,但输出未知。
加载示例数据。
负载iddata2
从数据估计一个非线性ARX模型。
M = nlarx(z2,[4 3 2],idWaveletNetwork);
确定输入的平衡状态值1和未知的目标输出。
x0 = findop (M,“稳定”1、南);
使用初始状态模拟模型x0.
选择= simOptions (“InitialCondition”, x0);sim (M, z2.u,选择)
在稳态工作点模拟Hammerstein-Wiener模型
加载示例数据。
负载iddata2
创建Hammerstein-Wiener模型。
M = nlhw(z2,[4 3 2],[], idpiecewislinear);
计算对应于的输入电平的稳态工作点值1和未知的输出水平。
x0 = findop (M,“稳定”1、南);
使用估计的初始状态模拟模型。
选择= simOptions (“InitialCondition”, x0);sim (M, z2.u)
模拟时间序列模型
加载时间序列数据,使用最小二乘方法估计AR模型。
负载iddata9z9sys = ar (z9 6“ls”);
对于时间序列数据,指定所需的模拟长度,N= 200N-by-0输入数据集。
data = iddata ([], 0 (200 0), z9.Ts);
设置初始条件,使用时间序列的初始样本作为历史输出样本。
IC =结构(“输入”[],“输出”z9.y (1:6));选择= simOptions (“InitialCondition”、集成电路);
模拟模型。
sim (sys、数据选择)
了解模型仿真中历史数据的使用
在模拟模型时,使用历史输入输出数据作为初始条件的代理。首先模拟使用sim卡命令并指定历史数据simOptions选项设置。然后,通过手动将历史数据映射到初始状态,再现模拟的输出。
加载一个两输入一输出的数据集。
负载iddata7z7
使用数据确定一个五阶状态空间模型。
sys = n4sid (z7 5);
将数据集分成两部分。
咱= z7 (1:15);zB = z7(16:结束);
使用输入信号来模拟模型zB.
uSim = zB;
模拟需要初始条件。的信号值咱是历史数据吗?也就是说,它们是紧挨着数据的时间的输入和输出值吗zB.使用咱作为所需初始条件的代理。
IO =结构(“输入”,咱。InputData,“输出”, zA.OutputData);选择= simOptions (“InitialCondition”IO);
模拟模型。
ysim = sim (sys、uSim选择);
现在通过将历史数据手动映射到初始状态来重新生成输出sys.要做到这一点,使用data2state命令。
xf = data2state (sys,咱);
xf的状态值sys在时间瞬间后立即将最近的数据采样进来咱.
使用以下命令模拟系统xf作为初始状态。
opt2 = simOptions (“InitialCondition”、xf);ysim2 = sim (sys、uSim opt2);
图的输出sim卡命令ysim以及手工计算的结果ysim2.
情节(ysim“b”ysim2,“——r”)
ysim2是一样的ysim.
输入参数
输出参数
提示
当估计模型和测量验证数据集的系统的初始条件不同时,模拟和测量的响应也可能不同,特别是在响应的开始阶段。为了最小化这个差异,使用
findstates并使用估计值来设置InitialCondition选择使用simOptions.例如,请参见将模型响应匹配到输出数据.
算法
模拟即使用输入数据和初始条件计算模型响应。sim卡模拟以下系统:

在这里,
u(t)为仿真输入数据,
udata.y(t)为模拟输出响应。
G从输入到输出的传递函数是否定义在
sys.模拟初始条件,如指定使用simOptions,设置的初始状态G.e(t)是一个可选的噪声信号。添加噪音到您的模拟通过创建
simOptions选项集,并设置AddNoise选项真正的.此外,您可以通过指定NoiseData选择。H噪声传递函数和定义在
sys.δu为输入信号减去的可选输入偏移量,u(t),然后使用输入来模拟模型。属性指定输入偏移量
InputOffset选择使用simOptions.δy是添加到输出响应的可选输出偏移量,y(t),后仿真。属性指定输出偏移量
OutputOffset选择使用simOptions.
有关指定模拟初始条件、输入和输出偏移量以及噪声信号数据的更多信息,请参见simOptions.对于多实验数据,您可以为每个实验分别指定这些选项。
选择
你也可以从以下列表中选择一个网站: