使用Field Dieuted Control AutoTuner调谐PI控制器
该示例通过使用Field Dieasted Control AutoTuner块计算速度和电流控制器内PI控制器的增益值。有关面向现场控制的详细信息,请参阅面向现场控制(FOC)。
该示例仅支持模拟。金宝app当您模拟该示例时,该模型使用PI控制器的提升的原油值来实现速度控制操作的稳定状态。
该模型仅在稳定状态下进行调谐。它根据控制器输出中的控制器目标(带宽和相位余量)引入干扰。该模型使用对干扰的系统响应,以计算最佳控制器增益。
模型
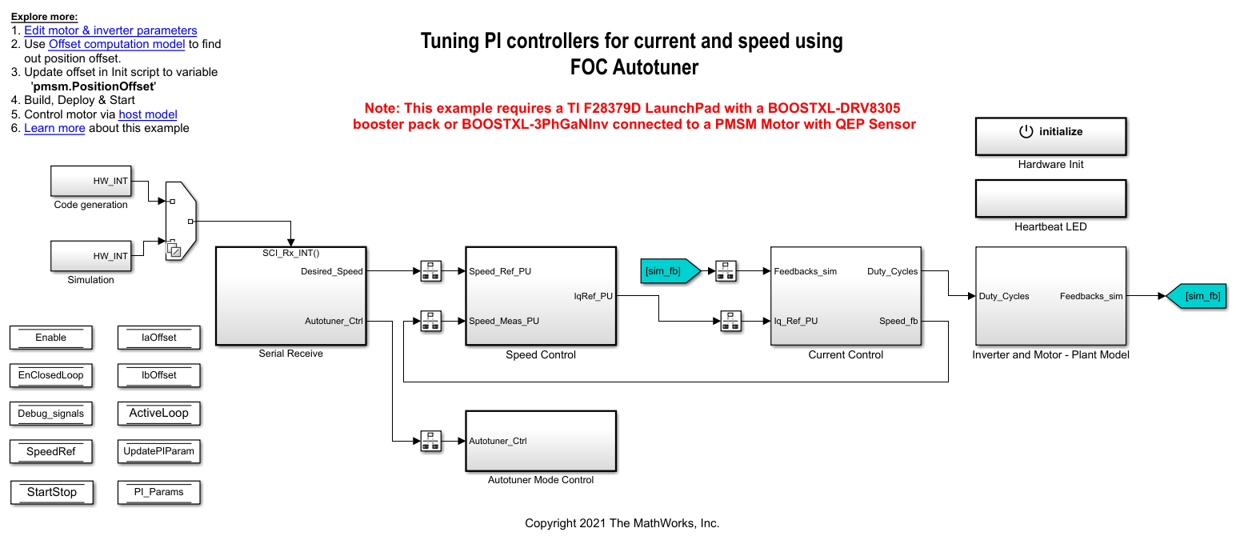
该示例包括模型mcb_pmsm_foc_autotuner.。
您可以仅使用此模型进行仿真。您还可以使用Open_System命令打开Simulink®型号:金宝app
Open_System('mcb_pmsm_foc_autotuner.slx');
需要MathWorks®产品进行仿真下载188bet金宝搏
电机控制BlockSet™
金宝appSimulink Control Design™
先决条件
1。获取电机参数。我们提供默认电机参数使用Simulink®模型,您可以使用电机数据表或其他来源的值替换。金宝app
但是,如果您有电机控制硬件,则可以使用电机控制块集参数估计工具估算要使用的电机的参数。有关说明,请参阅使用电机控制块集参数估算工具估算电机参数。
参数估计工具更新MotorParam.变量(在MATLAB®工作区中)具有估计的电机参数。
2。如果从数据表或其他源中获取电机参数,请在与Simulink®模型关联的模型初始化脚本中更新电机参数和逆变器参数。金宝app有关说明,请参阅从电机参数估计控制获得。
如果使用参数估计工具,可以更新逆变器参数,但不会更新模型初始化脚本中的电机参数。脚本自动从更新中提取电机参数MotorParam.工作区变量。
笔记:除了前面的产品外,还需要这些产品来使用参数估计工具:下载188bet金宝搏
嵌入式译码器
嵌入式Coder®支持德克萨斯乐金宝app器™C2000™处理器的支持包
模拟和运行模型以计算PI控制器增益
1。打开目标模型。
2。点击跑步在这一点模拟标签以模拟目标模型。
3.在PI_PARAMS_DISPLAY_AND_LOGGING子系统中可用的显示块中观察计算的PI控制器增益值。
4.使用这些增益值更新任何目标模型,以便快速将电机带到稳态状态。
您还可以从以下列表中选择一个网站: