Position Generator
Libraries:
Motor Control Blockset / Controls / Control Reference
Motor Control Blockset HDL Support / Controls / Control Reference
Description
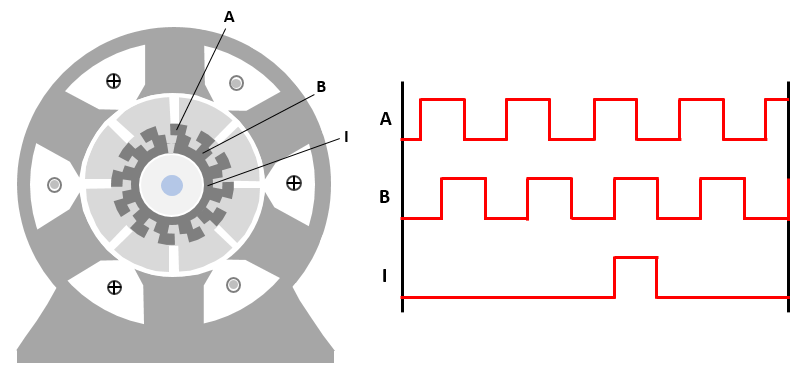
ThePosition Generatorblock generates a position ramp signal (with a frequency that is identical to that of the reference voltage signal) using the position increment value of the reference signal.
We recommend that you use fixed-step discrete solver for this block to enable code generation and ensure accurate simulation.

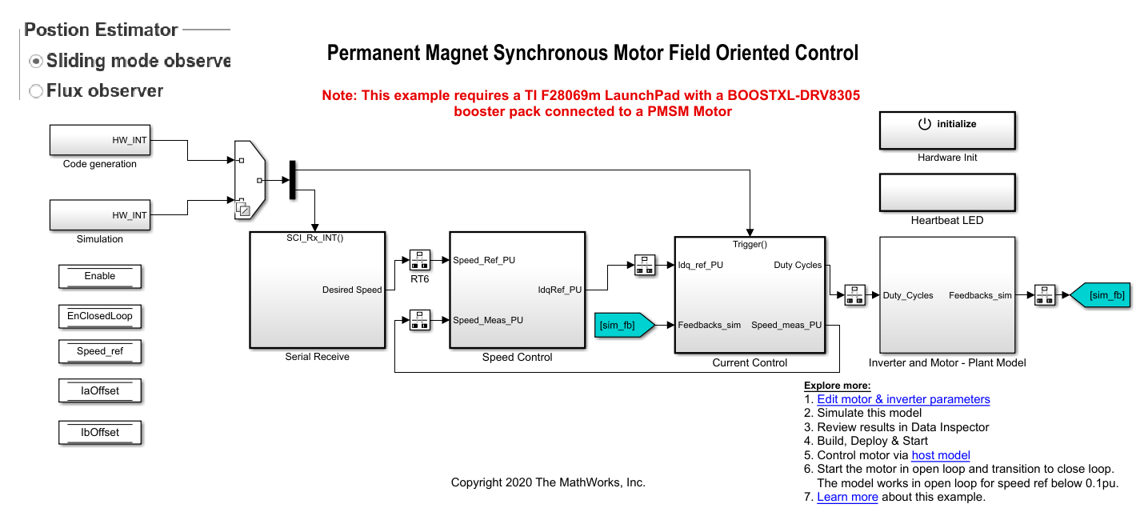
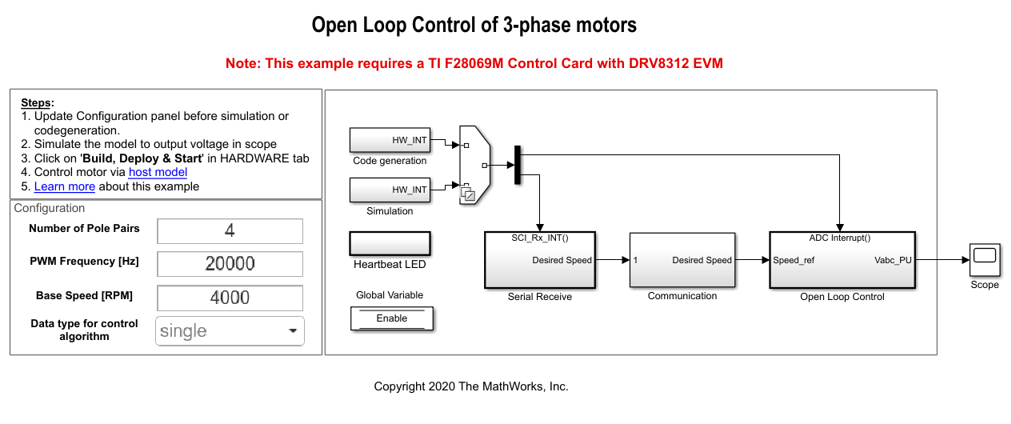
Examples
Ports
Input
Output
Parameters
Extended Capabilities
版本历史
Introduced in R2020a
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)