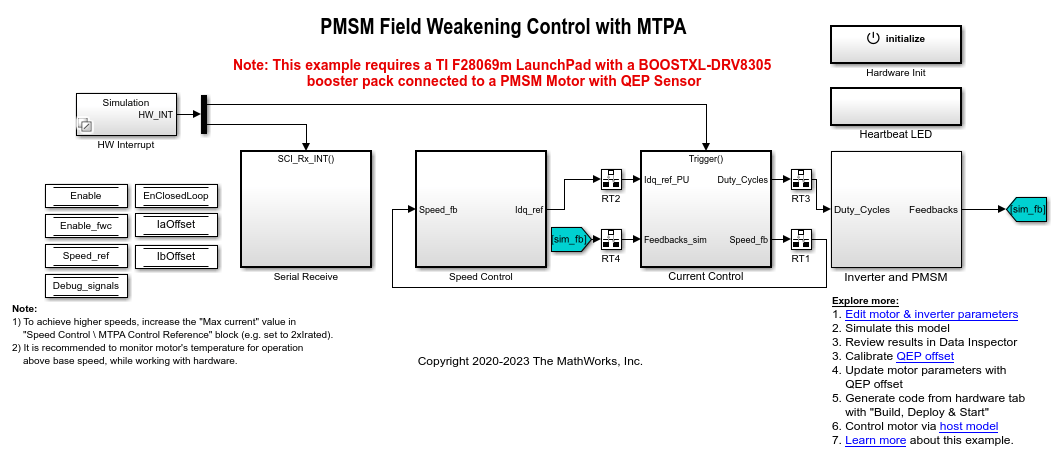
PMSM的磁场弱化控制(MTPA)
该实例实现了磁场定向控制(FOC)技术来控制三相永磁同步电机(PMSM)的扭矩和速度。该算法需要转子位置反馈,由正交编码器传感器获得。关于FOC的详细信息请参见磁场定向控制(FOC).
场强减弱控制
当您使用FOC算法运行具有额定磁通的电机时,最大速度受定子电压、额定电流和反电动势的限制。这个速度称为基本速度。超过这个速度,机器的操作是复杂的,因为反电动势大于电源电压。但是,如果您设置d-轴定子电流(Id)为负值时,转子链磁链减小,从而允许电机运行在基速以上。这种操作被称为电机的磁场减弱控制。

根据所连接的负载和机器的额定电流,参考值d设在电流( )在弱磁场控制中也限制了参考
)在弱磁场控制中也限制了参考问设在电流( ),从而限制扭矩输出。因此,电机运行在恒转矩区域,直到基速。如上图所示,它运行在恒功率区域,在基本速度之上有一个有限的扭矩。
),从而限制扭矩输出。因此,电机运行在恒转矩区域,直到基速。如上图所示,它运行在恒功率区域,在基本速度之上有一个有限的扭矩。
参考电流的计算取决于电机和逆变器参数。
注意:
对于某些表面pmms,(取决于参数)可能无法在额定电流下达到更高的速度。为了达到更高的速度,你需要用大于额定电流的最大电流使电机过载(如果机器的热条件在允许的范围内)。
当您在基速以上运行电机时,我们建议您监控电机的温度。在电机运行过程中,如果电机温度超过厂家推荐温度,出于安全考虑,应关闭电机。
当您在基础速度以上运行电机时,我们建议您以小步骤增加速度参考,以避免磁场减弱的动力学,这可能会使一些系统不稳定。
每安培最大扭矩(MTPA)
对于内置式永磁同步电动机,转子磁路的显著性导致转子的转速较高 比率(大于1)。这会在转子中产生磁阻转矩(除了现有的电磁转矩之外)。有关详细信息,请参阅该项目的控制参考.
比率(大于1)。这会在转子中产生磁阻转矩(除了现有的电磁转矩之外)。有关详细信息,请参阅该项目的控制参考.
因此,您可以以最佳的组合来操作机器和,在相同的定子电流下获得较大的转矩, .
.
这增加了机器的效率,因为定子电流损失是最小的。用于生成引用的算法和在机器中产生最大转矩的电流称为每安培最大转矩(MTPA)。

对于一个内部PMSM (IPMSM),这个例子计算参考和电流使用MTPA方法,直到基本速度。对于Surface PMSM (SPMSM),示例通过使用零实现MTPA操作d-轴参考电流,直到基准速度。
为了操作电机以上的基础速度,这个例子计算参考和适用于MTPA和磁场减弱控制,具体取决于电机类型。对于面式永磁同步电机,采用恒压恒功率(CVCP)控制方法。对于一种内部永磁同步电动机,采用电压电流限制最大转矩(VCLMT)控制方法。
有关MTPA控制参考块的信息,请参见该项目的控制参考.
目标的沟通
对于硬件实现,本示例使用一个主机和一个目标模型。在主机上运行的主机模型与部署到与电机相连的硬件上的目标模型通信。主机模型使用串行通信命令目标模型,并以闭环控制方式运行电机。
模型
这个例子使用了多个模型用于这些硬件配置:
速度控制磁弱场和MTPA PMSM的
转矩控制PMSM的MTPA:
您可以将这些模型用于模拟和代码生成。您也可以使用open_system命令来打开Simulink®模型。金宝app例如,对于基于F28069M的控制器使用以下命令:
open_system (“mcb_pmsm_fwc_qep_f28069LaunchPad.slx”);
需要MathWorks®产品下载188bet金宝搏
模拟模型:
1.模型:mcb_pmsm_fwc_qep_f28069LaunchPad和mcb_pmsm_mtpa_qep_f28069LaunchPad
电机控制Blockset™
定点设计师™
2.模型:mcb_pmsm_fwc_qep_f28379d和mcb_pmsm_mtpa_qep_f28379d
电机控制Blockset™
要生成代码和部署模型:
1.模型:mcb_pmsm_fwc_qep_f28069LaunchPad和mcb_pmsm_mtpa_qep_f28069LaunchPad
电机控制Blockset™
嵌入式编码器®
德克萨斯仪器嵌入式编码器®支持包金宝app™ C2000™ 处理器
定点设计师™
2.模型:mcb_pmsm_fwc_qep_f28379d和mcb_pmsm_mtpa_qep_f28379d
电机控制Blockset™
嵌入式编码器®
德克萨斯仪器嵌入式编码器®支持包金宝app™ C2000™ 处理器
定点设计器™(仅用于优化代码生成)
先决条件
1.获取电机参数。我们在Simulink®模型中提供默认的电机参数,您可以用电机数据表或其他来源的值替换。金宝app
然而,如果你有电机控制硬件,你可以估计你想使用的电机参数,通过使用电机控制模块参数估计工具。说明,请参阅使用电机控制模块参数估计工具估计电机参数.
参数估计工具更新motorParam变量(在MATLAB®工作空间中)与估计的电机参数。
2.如果您从数据表或其他来源获得电机参数,请更新与Simulink®模型相关的模型初始化脚本中的电机、逆变器和位置传感器校准参数。金宝app说明,请参阅从电机参数估计控制增益.
如果使用参数估计工具,可以更新逆变器和位置传感器校准参数,但不更新模型初始化脚本中的电机参数。该脚本自动提取电机参数从更新motorParam工作空间变量。
仿真(速度控制和转矩控制)模型
这个例子支持模拟。金宝app按照以下步骤模拟模型。
1.打开本示例中包含的模型。
2.点击运行在模拟TAB来模拟模型。
3.点击数据检查在模拟TAB来查看和分析仿真结果。
分析了速度控制模型的仿真结果
该模型使用单位系统来表示速度、电流、电压、扭矩和功率。在工作空间中键入PU System以查看这些量的单位值转换成SI单位。
观察系统的动态速度和电流控制器。此外,请注意,当电机运行在基础速度以上时,负Id电流。

注意:
对于某些表面pmms,(取决于参数)可能无法在额定电流下达到更高的速度。为了达到更高的速度,你需要用大于额定电流的最大电流使电机过载(如果机器的热条件在允许的范围内)。
当您在基速以上运行电机时,我们建议您监控电机温度。在电机运行过程中,如果电机温度超过厂家推荐温度,出于安全考虑,应关闭电机。
当您在基础速度以上运行电机时,我们建议您以小步骤增加速度参考,以避免磁场减弱的动力学,这可能会使一些系统不稳定。
分析了转矩控制模型的仿真结果
使用这三种方法产生的Id和Iq参考电流运行仿真:
1.使用MTPA控制参考块产生参考电流。
2.使用矢量控制参考块手动生成MTPA参考电流。
3.在没有MTPA的情况下生成控制引用。
第一种方法是在假设线性电感后,通过数学计算确定参考电流Id和Iq。
使用第二种方法手动生成非线性电感电机的MTPA查表。你可以用Id和Iq来说明这一点,通过扫转矩角度在+(π/2)到-(π/2)之间产生。
使用最后一种方法来获得参考电流而不需要MTPA算法。
您可以在数据检查器中比较这三种方法产生的扭矩和功率。

在前面的例子中,您可以注意到使用MTPA产生的电转矩是0.34PU,而不使用MTPA产生的电转矩是0.27PU。您还可以注意到,随着扭矩角度的变化,产生的最大扭矩与MTPA产生的扭矩相匹配。消极的d-轴电流表明,MTPA利用磁阻转矩用于内部永磁同步电动机。
注意:如果您使用的是Surface PMSM,将电机参数的类型从内部PMSM更改为Surface PMSM,在MTPA控制参考块中位于以下位置:“扭矩控制\MTPA_Reference\MTPA控制参考”。
生成代码和部署模型到目标硬件
本节将指导您生成代码并在目标硬件上运行FOC算法。
这个例子使用了一个主机和一个目标模型。主机型号是控制器硬件板的用户界面。您可以在主机计算机上运行主机型号。使用主机模型的前提是将目标模型部署到控制器硬件板上。主机模型使用串行通信命令目标Simulink®模型,并在闭环控制中运行电机。金宝app
所需的硬件
本示例支持这些硬件配置。金宝app也可以使用目标模型名称打开模型对应的硬件配置,从MATLAB®命令提示符。
LAUNCHXL-F28069M控制器+ BOOSTXL-DRV8305变频器:mcb_pmsm_fwc_qep_f28069LaunchPad和mcb_pmsm_mtpa_qep_f28069LaunchPad
LAUNCHXL-F28379D控制器+ BOOSTXL-DRV8305变频器:mcb_pmsm_fwc_qep_f28379d和mcb_pmsm_mtpa_qep_f28379d
与上述硬件配置相关的连接请参见LAUNCHXL-F28069M和LAUNCHXL-F28379D配置.
运行模型,实现速度和扭矩控制与磁场弱化和MTPA
1.对模型进行仿真,并对仿真结果进行分析。
2.完成硬件连接。
3.扭矩控制模型需要一个带有QEP传感器的内部PMSM,由一个带有速度控制(使用速度控制模型)的外部测力计驱动。
4.该模型自动计算ADC(或电流)偏移值。若要禁用此功能(默认启用),请将值0更新到可变逆变器。模型初始化脚本中的ADCOffsetCalibEnable。
或者,您可以计算ADC偏移值并在模型初始化脚本中手动更新它。说明,请参阅运行三相交流电机在开环控制和校准ADC偏移.
5.计算正交编码器索引偏移值,并在与目标模型相关联的模型初始化脚本中更新它。说明,请参阅永磁同步电机正交编码器偏移量标定.
6.打开要使用的硬件配置的目标模型。如果要更改目标型号的默认硬件配置设置,请参见模型配置参数.
7.在LAUNCHXL-F28379D的CPU2上加载一个示例程序,例如使用GPIO31 (c28379D_cpu2_blink.slx)操作CPU2蓝色LED的程序,以确保CPU2没有被错误地配置为使用为CPU1准备的单板外设。
8.点击构建、部署和启动在硬件选项卡以将目标模型部署到硬件。
9.单击主机模式在目标模型中进行超链接以打开关联的主机模型。您也可以使用open_system命令打开主机模型。例如,使用这个命令来实现速度控制:
open_system (“mcb_pmsm_fwc_host_model.slx”);


主机与目标型号的串口通信请参见主-目标通信.
10在主机型号的Host Serial Setup块掩码中,选择a端口名称.
11.在速度控制模型中,更新参考速度(RPM)块值。在Torque控制模型中,使用Imag Reference块更新当前请求。
12.点击运行在模拟选项卡以运行主机模型。
13.将启动/停止电机开关的位置改为On,启动和停止电机运行。
14.在主机模型的时间范围内,输入不同的参考速度(或电流)并观察RX子系统的调试信号。
请注意
如果位置偏移不正确,此示例可能导致电机中电流过大。为避免此情况,请确保在工作空间变量pmsm.PositionOffset中正确计算并更新位置偏移。
当您在基速以上运行电机时,我们建议您监控电机温度。在电机运行过程中,如果电机温度超过厂家推荐温度,出于安全考虑,应关闭电机。
当您在基础速度以上运行电机时,我们建议您以小步骤增加速度参考,以避免磁场减弱的动力学,这可能会使一些系统不稳定。
工具书类
玻色,现代电力电子和交流驱动器。普伦蒂斯霍尔,2001年。isbn - 0 - 13 - 016743 - 6。
罗伯特·D·洛伦茨,托马斯·利波,唐纳德·w·诺维特尼。"感应电动机的运动控制"IEEE论文集,第82卷,第8期,1994年8月,第1215-1240页。
Morimoto, Shigeo, masayka Sanada, Yoji Takeda。采用高性能电流调节器的内置永磁同步电动机的宽速度运行。IEEE工业应用汇刊,第30卷,第4期,1994年7月/ 8月,第920-926页。
[4],央。基于z源逆变器的永磁同步电机弱磁控制硕士论文,马凯特大学,e-Publications@Marquette, 2014年秋。
[5] 布里兹、费尔南多、迈克尔·W·德格纳和罗伯特·D·洛伦兹。“使用复向量分析和设计电流调节器”,《IEEE工业应用交易》,第36卷,第3期,2000年5月/6月,第817-825页。
[6] Briz,Fernando,et al.“[感应电动机]弱磁运行中的电流和磁通调节”,《IEEE工业应用交易》,第37卷,第1期,2001年1月/2月,第42-50页。
[7] TI应用笔记,“用于IPMSM电机驱动的带磁弱和MTPA的无传感器foc。”
你也可以从以下列表中选择一个网站: