车道保持辅助系统的使用模型预测控制
这个例子说明了如何使用车道保持辅助系统阻断的Simuli金宝appnk和演示了控制目标和该块的约束。
车道保持辅助系统
装备车道保持辅助(LKA)系统的车辆(ego-car)具有测量车道中心线和ego-car之间的横向偏差和相对偏航角的传感器,例如照相机。传感器还测量当前车道曲率和曲率导数。根据传感器可以看到的曲线长度,可以根据当前曲率和曲率导数计算出ego汽车前面的曲率。
该LKA系统通过调整自我的车前轮转向角度保持沿道路上的车道中心线自我自驾游。用于车道保持控制的目标是提高两个横向偏差和相对偏转角接近于零。

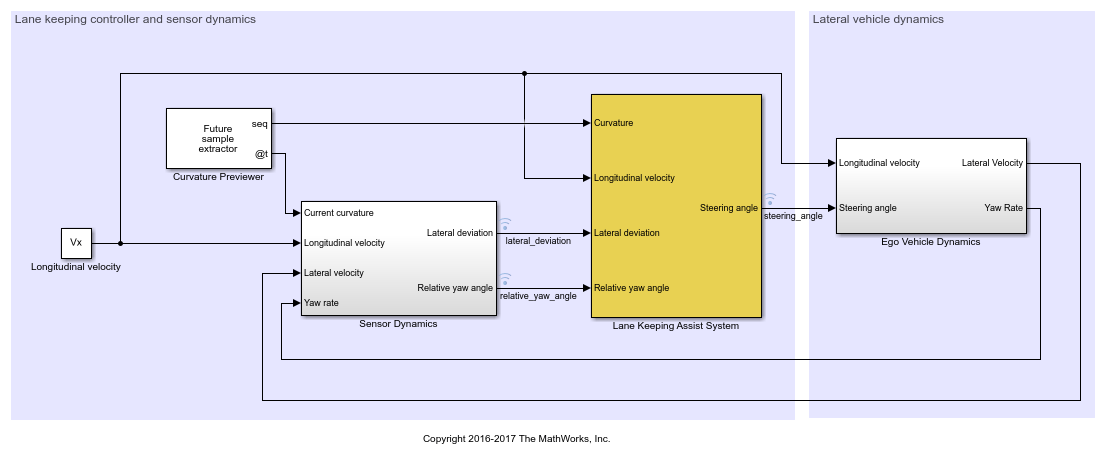
金宝appEgo汽车的Simulink模型
对于自我汽车动力学建模在Simulink。金宝app打开Simulin金宝appk模型。
MDL ='mpcLKAsystem';开放式系统(mdl)
定义采样时间,TS,以及模拟持续时间,Ť, 很快。
TS = 0.1;T = 15;
为了描述横向车辆动力学,本例使用自行车模型具有下列参数:
米是车辆总质量(kg)。IZ是车辆的横摆惯性矩(mNs^2)。低频是从重心到前轮胎(米)的纵向距离。轻轨是纵向距离从重心到后轮胎(米)。比照是前轮胎(N /弧度)的侧偏刚度。铬是后轮胎(N /弧度)的侧偏刚度。
M = 1575;IZ = 2875;LF = 1.2;LR = 1.6;CF = 19000;CR = 33000;
可以使用一个线性时变(LTI)系统具有以下状态,输入和输出变量表示所述横向车辆动态。被假定为状态变量的初始条件是零。
状态变量:横向速度
 和偏航角速率
和偏航角速率
输入变量:前转向角

输出变量:与状态变量相同



在这个例子中,纵向车辆动态特性,从车辆横向动力分离。因此,纵向速度被假定为是恒定的。在实践中,纵向速度可以变化。车道保持辅助系统块使用自适应MPC以相应地调节横向动力学的模型。
%指定米的纵向速度/秒。VX = 15;
指定一个状态空间模型,G(S)中,横向车辆动态。
A = [ - (2 * CF + 2 *的Cr)/ M / Vx的,-Vx-(2 * *比照LF-2 *铬* LR)/ M / Vx的;...- (2 * *比照LF-2 *铬* LR)/ Iz的/ Vx的, - (2 * *比照LF ^ 2 + 2 *铬* LR ^ 2)/ Iz的/ Vx的];B = [2 *的Cf /米,2 * *比照LF / Iz的]';C =眼(2);G = SS(A,B,C,0);
传感器动力学和曲率预览
在这个例子中,传感器动态块输出的横向偏差和相对偏航角。用于相对于偏航角的动力学是 ,其中
,其中 表示曲率。用于横向偏差的动力学是
表示曲率。用于横向偏差的动力学是 。
。
曲率预览器块以1秒的前瞻时间输出预览的曲率。因此,给定一个采样时间 ,预测范围
,预测范围10台阶。本例中使用的曲率是基于双换道机动的轨迹计算的。
指定预测范围并获取预览的曲率。
PredictionHorizon = 10;时间= 0:0.1:15;MD = getCurvature(Vx的,时间);
车道保持的配置辅助系统模块
在Simulink中使用车道保持辅助系统块对车道保持辅助系金宝app统进行建模。LKA系统块的输入为:
预览曲率(从车道检测)
自我纵向速度
横向偏差(从车道检测)
相对偏航角(从车道检测)
LKA系统的输出是ego轿车的前转向角。考虑到ego轿车的物理限制,转向角被限制在[-0.5,0.5]rad/s的范围内。
最小值=0.5;最大值=0.5;
在这个例子中,车道维持的默认参数辅助系统块匹配的仿真参数。如果你的模拟参数的默认值不同,相应地更新块参数。
仿真分析
运行模型。
SIM(MDL)
假设没有干扰加到测量到的输出信道#1。- >加入到测量的输出信道#2假设输出干扰被集成白噪声。- >的“MPC”对象的“Model.Noise”属性是空的。假设在每个测得的输出信道的白噪声。
绘制的模拟结果。
mpcLKAplot(洛格苏特)
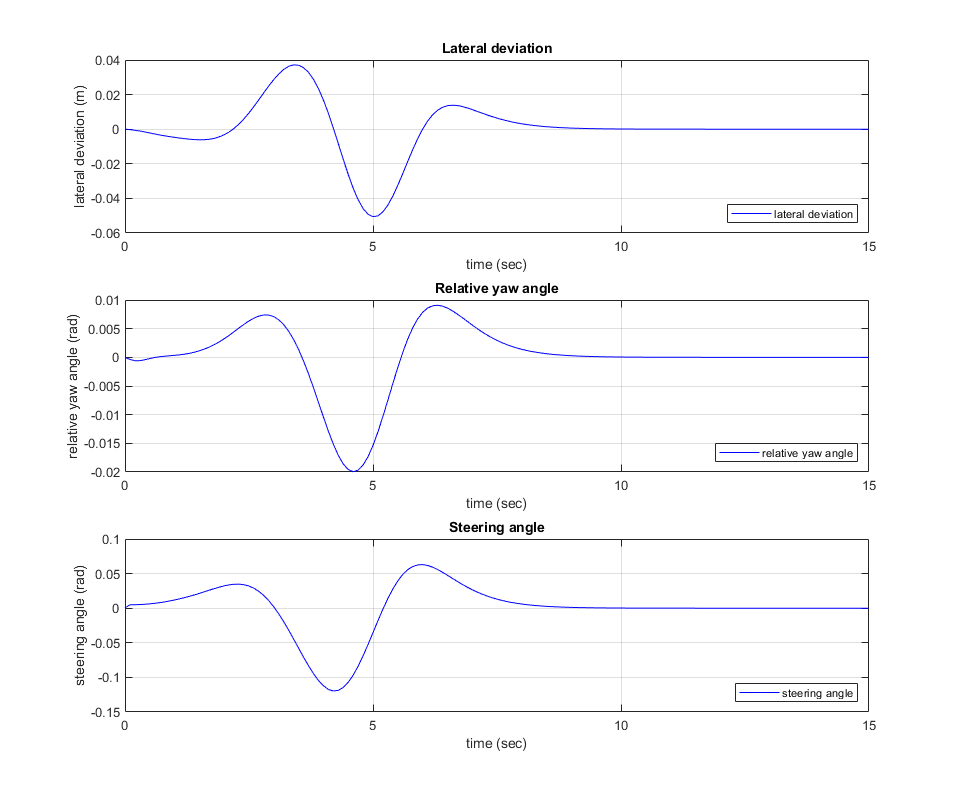
横向偏差和相对偏航角都收敛到零。也就是说,ego汽车根据预览的曲率紧跟道路。
关闭(mdl)
也可以看看
阻碍
相关主题
也可以从以下列表中选择网站:
