主要内容
gyroparams
陀螺仪传感器参数
描述
的gyroparams类创建一个陀螺仪传感器参数对象。您可以使用这个对象模型模拟的IMU时一个陀螺仪imuSensor。
创建
描述
参数个数= gyroparams
参数个数= gyroparams (名称,值)gyroparams使用一个或多个对象属性名称,值对参数。的名字是一个属性名称和价值相应的价值。的名字必须出现在单引号(”)。您可以指定几个名称-值对参数在任何顺序Name1, Value1,…,的家。任何未指定的属性默认值。
属性
例子
生成陀螺仪数据从静止的输入
生成陀螺仪数据imuSensor物体从静止的输入。
生成一个陀螺参数对象最大传感器读数为4.363 和1.332的军医的决议 。常数抵消偏差是0.349 。传感器的功率谱密度为8.727的军医 。从温度偏差是0.349 。温度的比例因子误差是0.2% 。传感器轴扭曲了2%。从线性加速度传感器偏差是0.178 e - 3
params = gyroparams (“MeasurementRange”,4.363,“决议”1.332 e-04“ConstantBias”,0.349,“NoiseDensity”,8.727的军医,“TemperatureBias”,0.349,“TemperatureScaleFactor”,0.02,“AxesMisalignment”2,“AccelerationBias”0.178 e - 3);
使用一个采样率为100 Hz飘飘然的超过1000个样本。创建imuSensor对象使用陀螺参数对象。
Fs = 100;numSamples = 1000;t = 0:1 / Fs:(numSamples-1) / Fs;imu = imuSensor (“accel-gyro”,“SampleRate”Fs,“陀螺”、参数);
从imuSensor生成陀螺仪数据对象。
东方=四元数。(numSamples, 1);acc = 0 (numSamples, 3);angvel = 0 (numSamples, 3);[~,gyroData] = imu (acc, angvel东方);
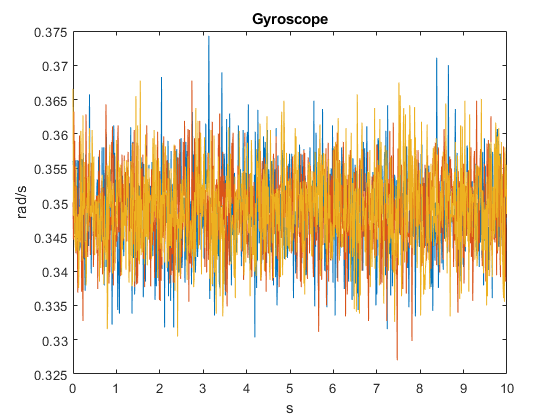
情节合成陀螺仪的数据。
情节(t, gyroData)标题(“陀螺”)包含(“年代”)ylabel (“rad / s”)
扩展功能
介绍了R2018b