主要内容
magparams
磁强计传感器参数
描述
的magparams类创建一个磁力计传感器参数对象。当模拟IMU时,您可以使用此对象来建模磁力计imusvesor.。
创建
描述
参数个数= magarams
参数个数= magparams (名称,值)magparams使用一个或多个对象属性名称,值对论点。的名字是属性名称和价值是相应的价值。的名字必须出现在单引号内('')。可以按如下顺序指定几个名称-值对参数name1,value1,...,namen,valuen。任何未指定的属性都占用默认值。
属性
例子
从静止输入产生磁力计数据
从静止输入生成用于Imusensor对象的磁力计数据。
产生一个磁强计参数对象,最大传感器读数为1200 分辨率是0。1 。恒定的偏置偏差是1 。传感器具有功率谱密度 。温度偏差为[0.8 0.8 2.4] 。温度的标度因子误差为0.1% 。
params = magparams ('测量范围', 1200,'解析度', 0.1,“ConstantBias”, 1'黑色曝光',(0.6 0.6 0.9) /√(100),'温度纤维'(0.8 0.8 2.4),“TemperatureScaleFactor”, 0.1);
使用超过1000个样品的100 Hz采样率。使用磁力计参数对象创建imusensor对象。
Fs = 100;numSamples = 1000;t = 0:1 / Fs:(numSamples-1) / Fs;imu = imuSensor ('Accel-Mag',“SampleRate”Fs,'磁力计',params);
从imussensor对象中生成磁力计数据。
东方=四元数。(numSamples, 1);acc = 0 (numSamples, 3);angvel = 0 (numSamples, 3);[~, magData] = imu(acc, angvel, orient);
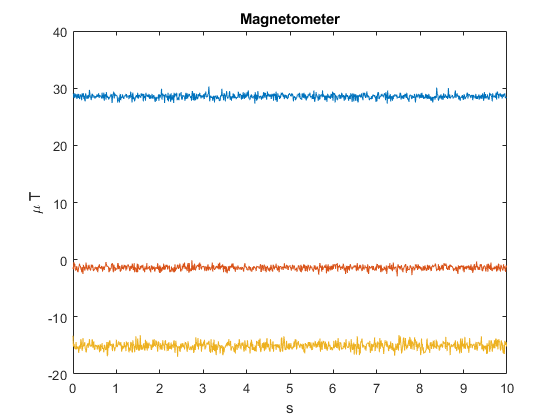
绘制合成磁强计数据。
绘制(T,Magdata)标题('磁力计')xlabel(“年代”)ylabel('\ mu t')
扩展功能
介绍了R2018b
您还可以从以下列表中选择一个网站: