主要内容
getOcupancy.
获取位置的占用值
语法
描述
例子
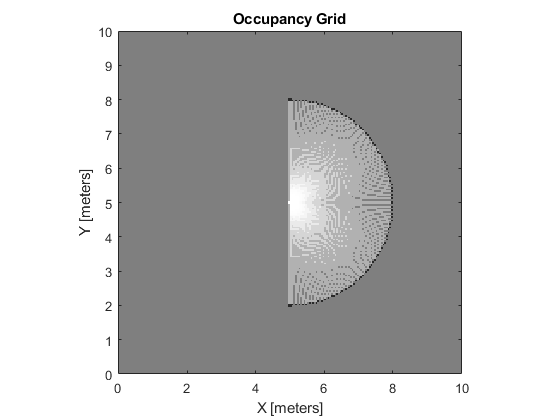
将激光扫描插入占用地图
创建空占用网格图。
地图= occupancyMap(10、10、20);
输入姿势的车辆,范围,角度和激光扫描的最大范围。
构成= (5 5 0);范围= 3 * 1 (100 1);角= linspace(-π/ 2π/ 2100);maxrange = 20;
创建一个Lidarscan.具有指定范围和角度的对象。
扫描= LIDARSCAN(范围,角度);
将激光扫描数据插入占用映射。
insertRay(地图,姿势,扫描,maxrange);
显示地图以查看插入激光扫描的结果。
显示(图)

检查车辆正前方位置的占用情况。
getOcupancy(地图,[8 5])
ANS = 0.7000.
添加第二次读取并将更新视图到占用值。额外的读数增加了读数的置信度。自由和占用的值变得更加明显。
insertRay(地图,姿势,扫描,maxrange);显示(图)
getOcupancy(地图,[8 5])
ans = 0.8448.
获取占用值并检查占用状态
访问占用值,并根据占用阈值和自由阈值检查占用状态occupancyMap对象。
创建一个矩阵并使用值填充它。使用此矩阵创建占用映射。
p = 0.5 * 1(20、20);的p (11:20, 11:20) = 0.75 * (10,10);地图= occupancyMap (p, 10);
获取不同地点的占用,并检查其占用状态。占用状态为自由空间返回0,为占用空间为1。未知值返回-1。
pocc = geto占位(map,[1.5 1])
pocc = 0.7500
占用= Checkoccupancy(Map,[1.5 1])
占用= 1
pocc2 = getocupancy(map,[5 5],'网格')
pocc2 = 0.5000
checkOccupancy(地图,[5 5],'网格')
occupied2 = 1
输入参数
输出参数
限制
占用值的分辨率有限,为±0.001。值存储为int16使用log-odds表示。这种数据类型限制了分辨率,但在MATLAB中存储大型地图时节省了内存®.当调用setOccupancy然后getOcupancy.,返回的值可能不等于您设置的值。有关更多信息,请参阅中的日志概率表示部分占用网格.
介绍了R2019b
您还可以从以下列表中选择一个网站: