主要内容
单纯的追求
线性和角速度控制命令
- 库:
机器人系统工具箱/移动机器人算法
导航工具箱/控制算法

描述
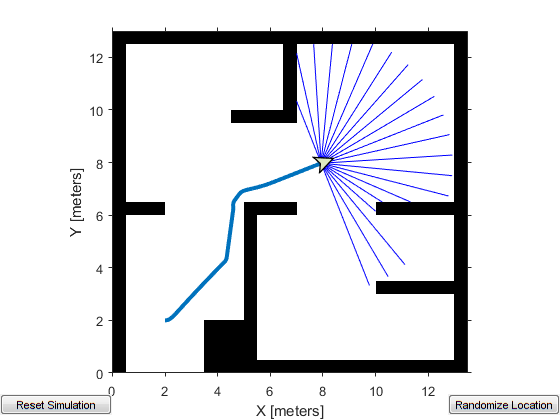
的单纯的追求块使用一组路径点和差动驱动车辆的当前姿态来计算线性和角速度命令。该模块采用更新的姿态来更新车辆的速度命令,使其沿着一组所需的路径点前进。使用最大角速度和想要的线速度参数来更新基于车辆性能的速度。
的超前距离参数计算路径上的前瞻点,这是车辆的瞬时局部目标。角速度命令是基于这一点计算的。改变超前距离对算法的性能有很大的影响。较高的前瞻距离会使车辆的轨迹更平稳,但也会导致车辆在道路上抄近路。过低的前视距离会导致跟踪路径的振荡,造成不稳定的行为。有关纯追求算法的更多信息,请参见纯追求控制器.
港口
输入
输出
参数
模型的例子
扩展功能
另请参阅
块
类
主题
介绍了R2019b
你也可以从以下列表中选择一个网站: