binaryOccupancyMap
用二进制值创建占用网格
描述
的binaryOccupancyMap创建一个2-D占用地图对象,您可以使用该对象来表示和可视化机器人工作区,包括障碍。传感器数据和位置估计的集成创建了障碍物的近似位置的空间表示。
占用网格用于机器人算法,如路径规划。它们也用于映射应用程序,如寻找无碰撞路径、执行避免碰撞和计算定位。您可以修改您的占用网格以适合您的特定应用程序。
占用网格中的每个单元格都有一个表示该单元格占用状态的值。被占用的位置表示为真正的(1)而一个自由位置表示为假(0).
该对象跟踪三个参考系:世界、本地和网格。世界框架原点定义为GridLocationInWorld,它定义了相对于世界框架的地图的左下角。的localorigininworld.属性指定本地帧相对于世界帧的原点位置。第一个带有索引的网格位置(1,1)从网格的左上角开始。
请注意
此对象先前已被命名机器人技术。BinaryOccupancyGrid.
创建
语法
描述
地图= binaryOccupancyMap创建了一个宽度和高度为10米的二维二元居住网格。默认的网格分辨率是每米一个单元格。
地图= binaryOccupancyMap(行、关口创建一个大小为(决议“网格”)行,关口).
输入参数
属性
对象的功能
checkOccupancy |
检查各地点的入住率 |
getOccupancy |
获取位置的占用值 |
grid2local. |
将网格索引转换为本地坐标 |
grid2world |
将网格索引转换为世界坐标 |
膨胀 |
膨胀每个占据的网格位置 |
insertRay |
插入激光扫描观察的射线 |
local2grid |
将局部坐标转换为网格索引 |
local2world |
将局部坐标转换为世界坐标 |
移动 |
在世界框架中移动地图 |
occupancyMatrix |
将占用网格转换为矩阵 |
raycast |
沿着射线计算单元格指数 |
rayIntersection |
找到光线和被占用的地图单元格的交点 |
setOccupancy |
设置位置占用值 |
显示 |
显示占用网格值 |
syncWith |
同步地图与重叠地图 |
world2grid |
将世界坐标转换为网格索引 |
world2local |
转换世界坐标到局部坐标 |
例子
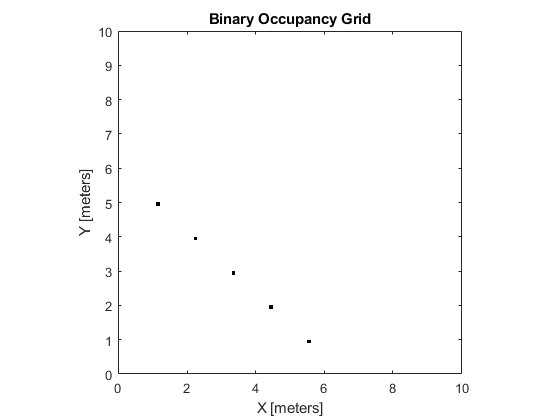
创建和修改二进制占用网格
创建一个10m x 10m的空地图。
地图= binaryOccupancyMap(10、10、10);
设置世界各地的占有率,并显示地图。
x = (1.2;2.3;3.4;4.5;5.6);y = (5.0;4.0;3.0;2.0;1.0); setOccupancy(map, [x y], ones(5,1)) figure show(map)
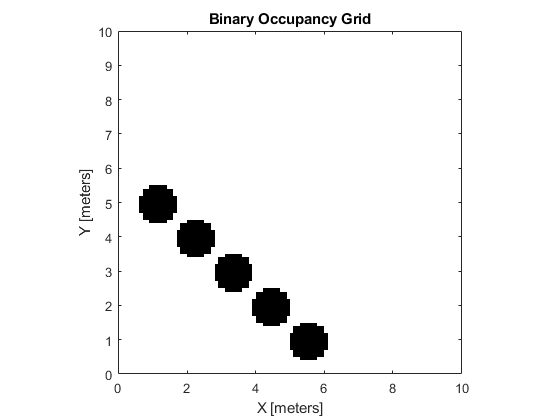
以给定的半径膨胀所占据的位置。
膨胀(地图,0.5)数字显示(地图)
从世界位置获得网格位置。
Ij = world2grid(map, [x y]);
将网格位置设置为空闲位置。
setOccupancy(地图,ij, 0(5、1),“网格”图显示(图)

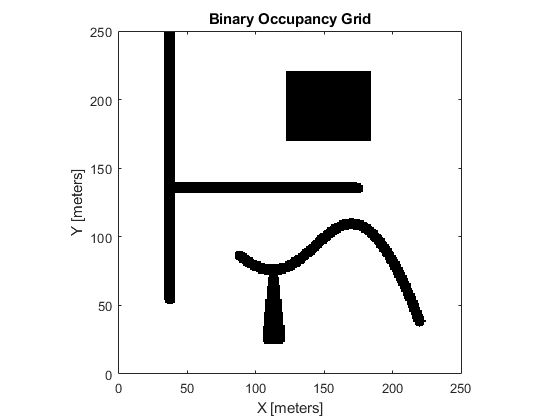
图像到二进制占用网格示例
这个示例演示了如何将图像转换为二进制占用网格,以便与映射和路径规划一起使用。
进口的形象。
形象= imread (“imageMap.png”);
转换为灰度,然后根据给定的阈值黑白图像。
grayimage = rgb2gray(图片);Bwimage = grayimage < 0.5;
用黑白图像作为矩阵输入,实现二进制占用网格。
网格= binaryOccupancyMap (bwimage);显示(网格)
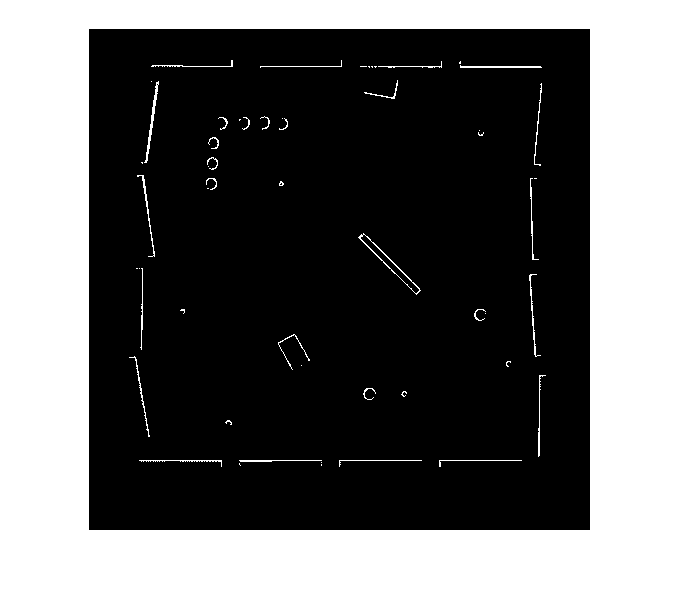
转换PGM图像映射
这个例子展示了如何转换.pgm文件到一个binaryOccupancyMap对象,在MATLAB中使用。
导入图片使用imread.图像相当大,应该裁剪到相关区域。
形象= imread (“playpen_map.pgm”);imageCropped =图像(750:1250 750:1250);imshow (imageCropped)

未知区域(灰色)应被删除,并将其视为自由空间。创建基于阈值的逻辑矩阵。根据您的图像,这个值可能不同。占用空间设置为1(图中白色)。
imagew = imageCropped < 100;imshow (imageBW)
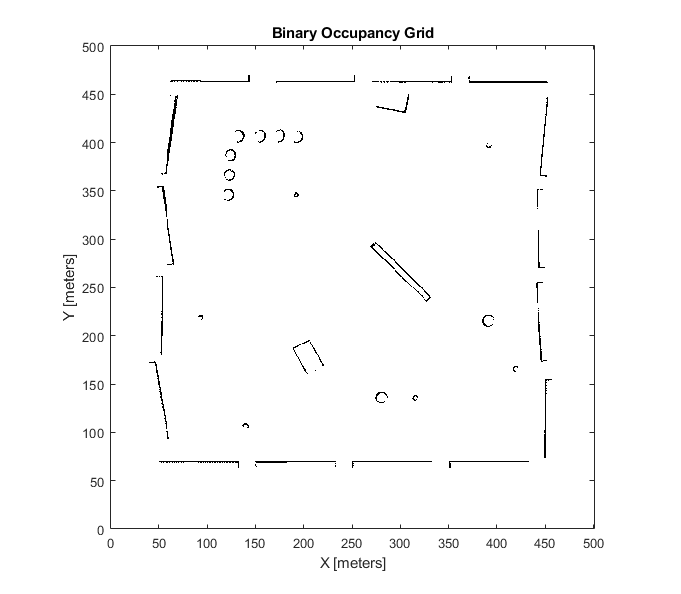
创建binaryOccupancyMap对象使用调整地图图像。
地图= binaryOccupancyMap (imageBW);显示(图)
兼容性的考虑
扩展功能
你也可以从以下列表中选择一个网站: