主要内容
向量场直方图
避免使用矢量字段直方图的障碍
- 库:
导航工具箱/控制算法

描述
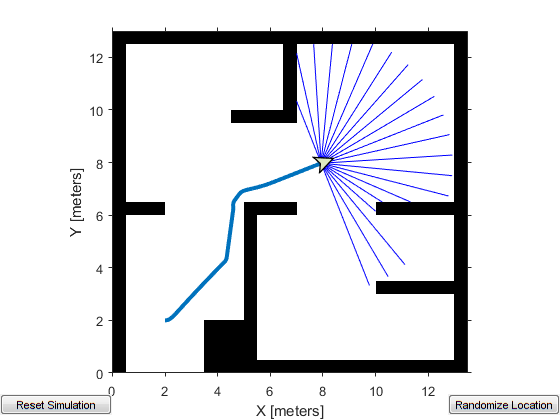
的向量场直方图(VFH)块使您的车辆避免障碍物基于距离传感器数据。给定距离传感器的范围和角度读数,以及行驶的目标方向,VFH控制器计算一个无障碍的转向方向。
有关算法详细信息的详细信息,请参阅向量场直方图在算法下。
限制
的
范围和角度当为使用该块的模型生成代码时,输入被限制为4000个元素。
港口
输入
输出
参数
算法
介绍了R2019b
您还可以从以下列表中选择一个网站: