trajectoryOptimalFrenet
为参考路径寻找最优轨迹
描述
的trajectoryOptimalFrenet对象为参考路径生成一个最优的、可行的、无碰撞的轨迹。
的计划函数计算的最优轨迹开始和终端状态。该函数为每对状态采样多条轨迹,并选择一条代价最小的可行轨迹。
创建
描述
输入参数
属性
对象的功能
cart2frenet |
把笛卡尔状态转换成弗雷涅状态 |
frenet2cart |
把弗雷涅状态转换成笛卡尔状态 |
计划 |
计划最优轨迹 |
显示 |
想象的轨迹 |
例子
Frenet空间的最优轨迹规划
这个例子展示了如何使用a来规划一个最优的轨迹trajectoryOptimalFrenet对象。
创建并分配映射到状态验证器
创建一个用于冲突检查的状态验证器对象。
stateValidator = validatorOccupancyMap;
创建一个障碍网格地图。
网格= 0 (50100);网格(24:26 48:53)= 1;
创建一个binaryOccupancyMap使用网格映射。
地图= binaryOccupancyMap(网格);
将映射分配给状态验证器。
stateValidator。地图=地图;
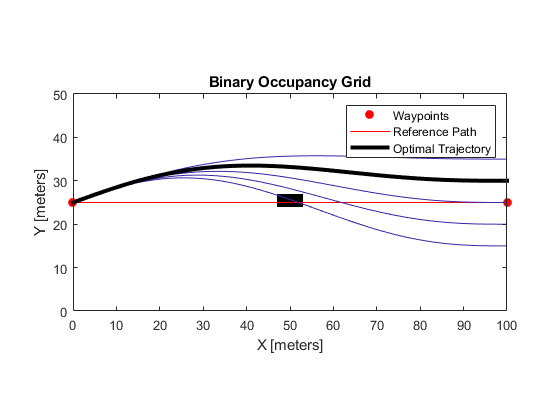
规划和可视化轨迹
为计划者创建一个参考路径。
refPath =[0, 25岁,100年,25);
声明cost函数句柄来优先处理左车道更改。
leftLaneChangeCost = @(状态)((状态(结束,2)< refPath(结束,2))*10);
使用引用路径、状态验证器和自定义成本函数初始化planner对象。
规划师= trajectoryOptimalFrenet (refPath stateValidator,“CostFunction”,leftLaneChangeCost);
指定纵向终端状态、横向偏移和最大加速度值。
planner.TerminalStates。纵向= 100;planner.TerminalStates。横向= 10:10:10;planner.FeasibilityParameters。MaxAcceleration = 10;
轨迹规划
车辆的初始状态。
initFrenetState = 0 (1,6);
从最初的Frenet状态规划一个轨迹。
计划(计划、initFrenetState);
轨迹可视化
将地图和轨迹形象化。
显示(map)在显示(规划师,“轨迹”,“所有”)
划分轨迹生成的纵向末端状态
这个例子展示了如何在最优轨迹规划中分割纵向末端状态trajectoryOptimalFrenet对象。
创建并分配映射到状态验证器
创建一个用于冲突检查的状态验证器对象。
statevalidator = validatorOccupancyMap;
创建一个障碍网格地图。
网格= 0 (50100);网格(22:24,28:33)= 1;网格(18:20 37:42)= 1;网格(29:31 72:77)= 1;
创建一个binaryOccupancyMap使用网格映射。
地图= binaryOccupancyMap(网格);
将映射分配给状态验证器。
statevalidator。地图=地图;
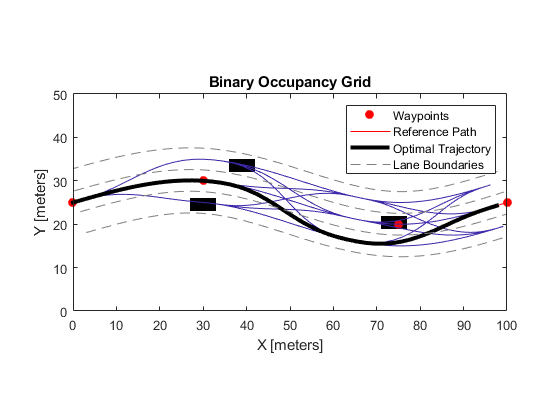
规划和可视化轨迹
为计划者创建一个参考路径。
refPath =[0, 25岁,30岁,30岁,75年,20,100,25);
使用引用路径和状态验证器初始化planner对象。
规划师= trajectoryOptimalFrenet (refPath statevalidator);
指定纵向终端状态和最大加速度值。
planner.TerminalStates。纵向= 100;planner.FeasibilityParameters。MaxAcceleration = 10;
轨迹规划
车辆的初始状态。
initFrenetState = 0 (1,6);
为纵向终端状态分配分区数。
计划。NumSegments = 3;
从最初的Frenet状态规划一个轨迹。
计划(计划、initFrenetState);
轨迹可视化
将地图和轨迹形象化。
显示(map)在显示(规划师,“轨迹”,“所有”)
限制
引用路径中的自交叉可能会导致意外行为。
计划员不支持反向驱动。金宝app
规划的初始方向应该在内部
-π/ 2和π/ 2指向引用路径。限制TerminalStates实时应用,因为计算复杂性随着它的增长而增长。
参考文献
[1] Werling, Moritz, Julius Ziegler, Soren Kammel和Sebastian Thrun。" Frenet框架下动态街道场景的最佳轨迹生成"2010年IEEE机器人和自动化国际会议。2010年,页987 - 993。