plannerHybridAStar
混合型A*路径规划器
描述
该混合路径规划器对象在给定的二维空间中为具有非完整约束的车辆生成一条平滑路径。
请注意
混合A*计划器通过插值运动原语和分析扩展来检查地图中的碰撞验证数据财产的财产StateValidator.对象。如果是验证数据属性设置为INF.,对象根据状态验证器中指定的映射单元格大小进行插值。在将占用图分配给计划人员之前,先填充占用图,以考虑车辆的大小。
创建
描述
策划者= plannerhybridastar(验证器)验证器输入为A.Validatoroccupancemap.或者validatorVehicleCostmap对象。的验证器输入设置值的值StateValidator.财产。
策划者= plannerhybridastar(验证器,名称,值)
属性
例子
使用混合动力的无障碍路径规划
利用混合a *算法规划车辆通过停车场的无碰撞路径。
创建并将映射创建并分配到状态验证程序
在停车场的车辆肋架中加载细胞的成本值。
负载parkingLotCostVal.mat% costVal
创建一个binaryOccupancyMap具有成本价值。
地图= Binaryoccupancap(Costval);
创建一个用于碰撞检查的状态验证器对象。
验证器= validatorOccupancyMap;
将映射分配给状态Validator对象。
验证器。地图=地图;
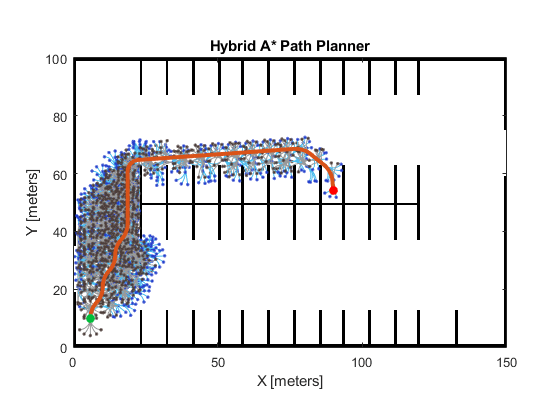
计划和可视化路径
初始化plannerHybridAStar使用状态验证器对象创建的。指定MinTurningRadius和MotionPrimitiveLength计划者的财产。
Planner = Plannerhybridastar(验证器,'minturningradius',4,“MotionPrimitiveLength”6);
定义车辆的开始和目标姿势[x, y,θ)向量。x和y以米为单位指定位置,和θ指定弧度中的方向角度。
血统= [6 10 pi / 2];%[米,米,弧度]守门= [90 54-pi / 2];
规划从开始姿势到目标姿势的路径。
Refpath =计划(规划师,血统,守缩小);
使用show函数可视化路径。
显示(计划)
参考
Dolgov, Dmitri, Sebastian Thrun, Michael Montemerlo和James Diebel。自动驾驶路径规划中的实用搜索技术.美国人工智能协会,2008。
Petereit, Janko, Thomas Emter, Christian W. Frey, Thomas Kopfstedt和Andreas Beutel。混合A*在非结构化户外环境下自主移动机器人路径规划中的应用ROBOTIK 2012:第七届德国机器人大会.2012年,第1-6页。
扩展功能
您还可以从以下列表中选择一个网站: