主要内容
ValidatorvehiclecostMap.
基于2-D CostMap的状态验证器
描述
这Validatoroccupancemap.对象基于2-D CostMap中的值验证状态和离散情况。占用的地图位置被解释为无效状态。
创建
句法
描述
验证器= ValidatorvehiclecostMap.
验证器= ValidatorVehicLecostMap(标准空间)NAV.STATESPACE.。
验证器= ValidatorVehicLecostMap(标准空间那Xyindices.)Xyindices.属性指定状态向量中的哪些变量定义XY.- 控制。
验证器= ValidatorVehicLecostMap(标准空间那名称,价值)地图或者Xyindices.属性使用名称,价值对论点。
特性
对象功能
复制 |
创建状态验证器对象的深度副本 |
isstatevalid. |
检查状态是否有效 |
IsMotionValid. |
检查状态之间的路径是否有效 |
例子
通过车辆CostMap环境进行验证路径
此示例显示如何通过环境流行验证路径。
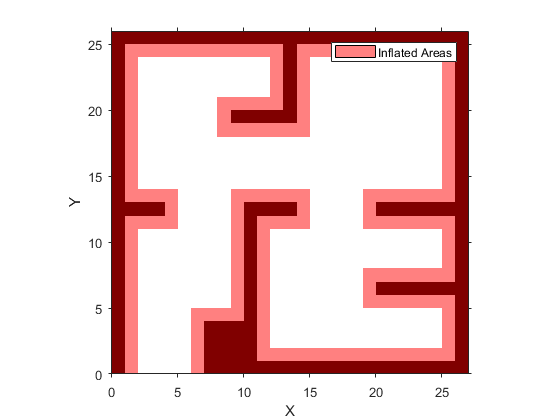
加载示例映射。使用简单地图创建车辆成本图。指定1米的通胀雷德斯。
加载examplemapsmat.地图= veviclecostmap(双(simplemap));map.collisionChecker = FinnationCollisionChecker(“膨胀radius”,1);情节(地图)
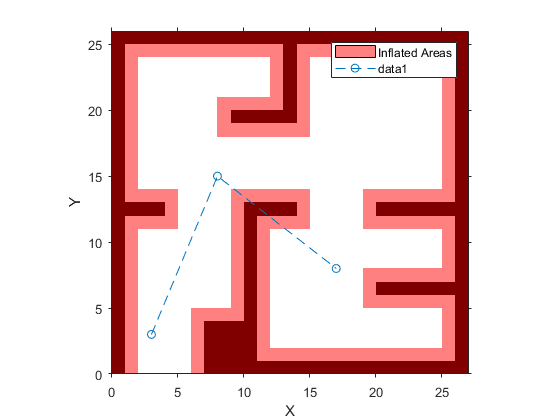
通过地图指定粗略路径。
路径= [3 3 pi / 2;8 15 0;17 8-pi / 2];抓住上绘图(路径(:,1),路径(:,2),“--o”)
使用该验证器创建状态SolultPacese2.定义。指定地图和用于内插和验证路径段的距离。
Validator = ValidatorvehiclecostMap(SoursePacese2);validator.map = map;Validator.ValidationDistance = 0.1;
检查路径的点是有效状态。所有三个点都在自由空间中,所以被认为有效。
IsValid = IsStateValid(Validator,Path)
isvalid =3x1逻辑阵列1 1 1
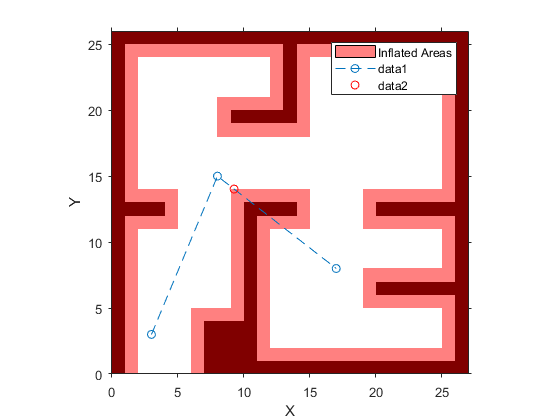
检查每个顺序路径状态之间的运动。这IsMotionValid.功能沿着状态之间的路径插值。如果路径段无效,请沿路径绘制最后一个有效点。
startstates = [path(1,:);路径(2,:)];endstates = [路径(2,:);路径(3,:)];为了i = 1:2 [ispathvalid,lastvalid] = iSmotionValid(validator,startstates(i,:),endstates(i,:));如果〜IspathValid Plot(LastValid(1),LastValid(2),'或者')结尾结尾抓住离开
扩展能力
在R2019B中介绍
您还可以从以下列表中选择一个网站: