相位多普勒成像仪
多普勒估计
描述
这个相位多普勒成像仪系统对象™ 估计目标的多普勒频率。估计器的输入由检测器输出的检测位置和距离多普勒响应数据立方体组成。对检测进行聚类时,使用聚类信息计算多普勒频率。聚类将多个检测关联为一个扩展检测。
要计算检测的多普勒值:
定义和设置你的多普勒估计使用建设随后的程序。
打电话给
步方法,使用指定的属性计算检测的多普勒相位多普勒成像仪系统对象。
笔记
而不是使用步方法执行System对象定义的操作时,可以使用参数调用对象,就像调用函数一样。例如,y=阶跃(obj,x)和y = obj (x)执行等效操作。
建设
估计器=相控DopplerEstimator创建多普勒估计器系统对象,估计员.
估计器=相控DopplerEstimator(创建一个System对象,名称,价值)估计员,具有每个指定的属性名称设置为指定的值价值。您可以按以下任意顺序指定其他名称和值对参数:(Name1, Value1,...,纳曼,瓦伦).
性质
例子
估算三个目标的距离和速度
为了估计三个目标的距离和速度,使用分阶段。RangeDopplerResponse系统对象™. 然后使用相位距离估计器和相位多普勒成像仪系统目标是估计距离和速度。发射机和接收机是并置的各向同性天线单元,构成单基地雷达系统。
发射信号为线性调频波形,脉冲重复间隔(PRI)为7.0μs,占空比为2%,工作频率为77GHz,采样率为150MHz。
fs=150e6;c=physconst(“光速”);fc = 77.0 e9;革命制度党= 7 e-6;脉冲重复频率= 1 /革命制度党;
设置场景参数。发射机和接收机固定在原点。目标距离雷达500、530和750米x-轴心国。目标沿着轨道移动x-轴的速度为–60、20和40 m/s。所有三个目标的非起伏雷达散射截面(RCS)均为10 dB。创建目标和雷达平台。
Numtgts = 3;tgtpos = 0 (Numtgts);Tgtpos (1,:) = [500 530 750];Numtgts tgtvel = 0(3日);Tgtvel (1,:) = [-60 20 40];TGTRCS = db2pow(10)*[1 1 1];tgtmotion = phased.Platform (tgtpos tgtvel);=阶段性目标。RadarTarget (“传播速度”c“OperatingFrequency”,fc,...“MeanRCS”, tgtrcs);radarpos = (0, 0, 0);radarvel = (0, 0, 0);radarmotion = phased.Platform (radarpos radarvel);
创建发射机和接收机天线。
txantenna = phased.IsotropicAntennaElement;rxantenna =克隆(txantenna);
建立发射机端信号处理。创建一个上扫线性调频信号,带宽为采样率的一半。在样本中找到PRI的长度,然后估计rms带宽和范围分辨率。
bw = f / 2;波形=分阶段。LinearFMWaveform (“采样器”fs,...“PRF”,prf,“输出格式”,“脉搏”,“NumPulses”1.“扫频带宽”,fs/2,...“持续时间规范”,“占空比”,“尽职调查”, 0.02);sig =波形();Nr =长度(团体);bwrms =带宽(波形)/√(12);rngrms = c / bwrms;
设置发射器和散热器系统对象属性。峰值输出功率为10 W,发射机增益为36 dB。
峰值功率=10;txgain=36.0;txgain=36.0;发射机=相控发射机(...“峰值功率”,峰值功率,...“获得”,txgain,...“InUseOutputPort”,真);散热器=相控。散热器(...“传感器”txantenna,...“传播速度”c...“OperatingFrequency”、fc);
在双向传播模式下建立自由空间信道。
通道=相控。自由空间(...“采样器”fs,...“传播速度”c...“OperatingFrequency”,fc,...“TwoWayPropagation”,对);
设置接收器端处理。设置接收器增益和噪声系数。
收集器=分阶段。收集器(...“传感器”,Rxatenena,...“传播速度”c...“OperatingFrequency”,fc);rxgain=42.0;noisefig=1;接收器=相控。接收器前置放大器(...“采样器”fs,...“获得”,rxgain,...“噪音图”, noisefig);
在脉冲上循环以创建包含128个脉冲的数据立方体。对于循环的每个步骤,移动目标并传播信号。然后将接收到的信号放入数据立方体。数据立方体包含每个脉冲的接收信号。通常,数据立方体有三个维度,其中最后一个维度对应于天线或波束。因为只有在使用e传感器时,立方体只有两个维度。
处理步骤如下:
移动雷达和目标。
传输波形。
将波形信号传播到目标。
反射来自目标的信号。
将波形传播回雷达。双向传播使您能够将返回传播与出站传播相结合。
在雷达上接收信号。
将信号加载到数据立方体中。
Np=128;dt=pri;cube=0(Nr,Np);对于n=1:Np[sensorpos,sensorvel]=雷达运动(dt);[tgtpos,tgtvel]=tgtmotion(dt);[tgtrng,tgtang]=范围角(tgtpos,sensorpos);sig=波形();[txsig,txstatus]=发射机(sig);txsig=散热器(txsig,tgtang);txsig=通道(txsig、传感器POS、tgtpos、传感器电平、tgtvel);tgtsig=目标(txsig);rxcol=收集器(tgtsig,tgtang);rxsig=接收器(rxcol);立方体(:,n)=rxsig;终止
显示包含每个脉冲信号的数据立方体。
imagesc([0:(Np-1)]*pri*1e6[0:(Nr-1)]/fs*1e6,abs(cube))xlabel(慢时间{\μ}年代”) ylabel ('快速时间{\mu}'s')轴心xy

创建和显示128多普勒箱的距离多普勒图像。该图像垂直显示范围和水平速度。使用线性调频波形进行匹配滤波。这里的图像是距离多普勒地图。
ndop = 128;rangedopresp =分阶段。RangeDopplerResponse (“采样器”fs,...“传播速度”c“DopplerFFTLengthSource”,“财产”,...“dopplerftlength”,ndop,“DopplerOutput”,“速度”,...“OperatingFrequency”,fc);matchingcoeff=getMatchedFilter(波形);[rngdopresp,rnggrid,dopgrid]=rangedopresp(立方体,matchingcoeff);imagesc(dopgrid,rnggrid,10*log10(abs(rngdopresp)))xlabel(‘关闭速度(m/s)’) ylabel (‘射程(米)’)轴心xy
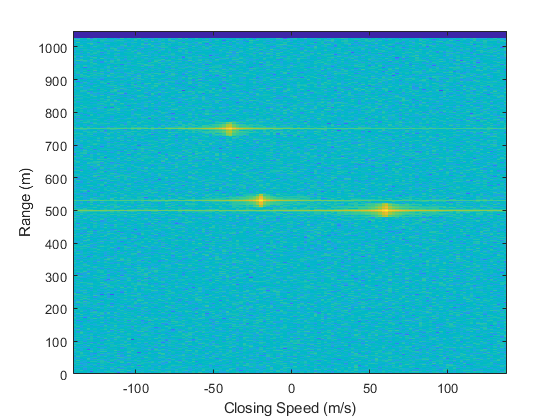
因为目标位于正面x-轴,在全局坐标系中,正速度对应负的关闭速度。在全局坐标系中,负的速度对应于正的关闭速度。
估计匹配滤波后的噪声功率。为模拟目的创建一个恒定的噪声背景图像。
mfgain = matchingcoeff ' * matchingcoeff;dopgain = Np;noisebw = f;noisepower = noisepow (noisebw receiver.NoiseFigure receiver.ReferenceTemperature);noisepowerprc = mfgain * dopgain * noisepower;噪音= noisepowerprc *的(大小(rngdopresp));
创建距离和多普勒估计对象。
测距估计器=相位测距估计器(“Numestimatesource”,“汽车”,...“差异输出端口”,真的,“噪声电源”,“输入端口”,...“RMSResolution”,rngrms);dopestimator=相控DopplerEstimator(“差异输出端口”,真的,...“噪声电源”,“输入端口”,“NumPulses”、Np);
在距离多普勒图像中定位目标指数。为简单起见,不使用恒虚警检测器,而是使用目标的已知位置和速度来获得距离多普勒图像中的相应指数。
detidx=NaN(2,Numtgts);tgtrng=rangeangle(tgtpos,radarpos);tgtspd=radialspeed(tgtpos,tgtvel,radarpos,radarvel);tgtdop=2*speed2dop(tgtspd,c/fc);对于m = 1:numel(tgtrng) [~,iMin] = min(abs(rngrid -tgtrng(m)));detidx(1米)= iMin;[~, iMin] = min (abs (dopgrid-tgtspd (m)));detidx(2米)= iMin;终止
查找检测位置处的噪声功率。
印第安纳州= sub2ind(大小(噪音),detidx (1:), detidx (2:));
估计探测位置的距离和距离方差。估计的量程与假定的量程一致。
[rng, rngvar] = rangeestimator (rngdopresp、rnggrid detidx,噪音(印第安纳州))
rng =3×1499.7911 529.8380 750.0983
rngvar=3×110-4× 0.0273 0.0276 0.2094
估计检测位置的速度和速度变化。估计的速度与预测的速度一致。
[spdest,spdvar]=dopestimator(rngdopresp,dopgrid,detidx,noise(ind))
社民党=3×160.5241 -19.6167 -39.5838
spdvar=3×110-5× 0.0806 0.0816 0.6188
算法
参考文献
[1] 理查兹,M。雷达信号处理基础。麦格劳·希尔专业工程第二版,2014年。
理查兹,M, J.谢尔和W.霍尔姆,现代雷达原理:基本原理.科学技术出版社,2010年。
扩展能力
另见
功能
物体
话题
你也可以从以下列表中选择一个网站:
