tsadifference
时间同步平均信号的差分信号
语法
描述
___= tsadifference (___)允许您使用一个或多个名称值对参数指定其他参数。您可以使用任何先前输入和输出参数使用此语法。
TSADIFERES(___)没有输出参数绘制原始和差异TSA信号的时域和频域图。
例子
找出并可视化一个复合TSA信号的差信号
考虑一个由装有振动传感器的电机驱动的六齿轮传动系统,如下图所示。电机轴上的齿轮1与齿轮2啮合,传动比为17:1。最终的齿轮比,即齿轮1和齿轮2和齿轮3和齿轮4之间的比率是51:1。齿轮5,也在电机轴上,以10:1的传动比与齿轮6啮合。电机转速为180rpm,振动传感器采样率为50khz。为了获得仅仅包含齿轮5和6的啮合组件的信号,通过指定它们的齿轮比为17和51英寸,过滤掉轴旋转的组件,齿轮1和2和,3和4orderList.对应于轴旋转(Order = 1)的信号分量总是隐含地包括在计算中。
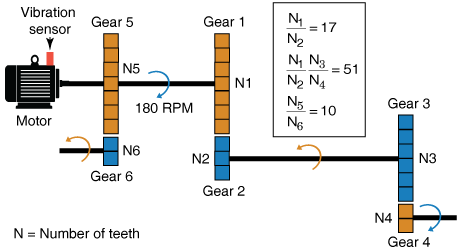
rpm = 180;fs = 50 e3;t = (0:1 / fs (1/3): 1 / fs) ';%样品时间OrderList = [17 51];f = rpm / 60 * [1 orderlist 10];
在实践中,您将使用从加速度计获得的振动信号等测量数据。对于本例,生成TSA信号X,这是安装在电机上的振动传感器的模拟数据。
X = SIN(2 * PI * F(1)* T)+ SIN(2 * PI * 2 * F(1)* T)+......%电机轴旋转和谐波3*sin(2* f(2) t) + 3*sin(2* f(2) t) +......%齿轮网振动和齿轮1和2的谐波4 * sin(2 * pi * f(3)* t)+ 4 * sin(2 * pi * 2 * f(3)* t)+......%齿轮振动和齿轮3和4的谐波2 * sin(2 *π* 10 * f (1) * t);齿轮5和齿轮6的啮合振动%
使用采样时间、转速和要过滤掉的网格顺序计算TSA信号的差分信号。
Y = tsadifference (X, t, rpm, orderList);
输出Y是一个矢量,包含齿轮啮合信号和谐波齿轮5和6。
将差分信号,原始的TSA信号,和它们的振幅谱绘制在图上。
tsadifference (X, fs, rpm, orderList)
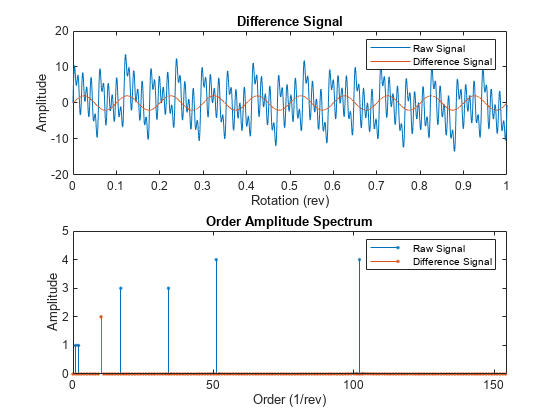
从幅度谱图,请遵守以下组件:
在第17阶的过滤组件及其在第34阶处的谐波
第二滤波分量在51阶,它的谐波在102阶
齿轮5和6的剩余网元件在第10阶处
在第1和第2阶过滤轴组件
频谱图上的幅度匹配各个信号的幅度
计算TSA信号的差分信号和幅值谱
在这个例子中,sineWavePhaseMod.mat包含相位调制正弦波的数据。XT.是否有正弦波数据和时间表rpm使用的是60 RPM。正弦波的频率是32赫兹。为了滤除未调制的正弦波和相位调制信号的边带,使用32作为滤波器orderList.
加载数据和所需的变量。
加载('sinewavephasemod.mat','xt','rpm',“订单”)头(XT,4)
ans =.4×1的时间表时间数据______________ _______ 0 sec 0 0.00097656 sec 0.2011 0.0019531 sec 0.39399 0.0029297 sec 0.57078
注意,时间值在XT.严格增加,等距和有限。
计算差分信号及其幅度谱。设置价值“域”到“频率”因为订单是以Hz为单位的。
[y,s] = tsadifference(xt,rpm,订单,“域”,“频率”)
y =1024×1的时间表时间数据______________ __________ 0 sec 2.2849e-15 0.0097656 sec 0.046525 0.0019531 sec 0.091185 0.0029297 sec 0.13219 0.0039062 sec 0.1679 0.0048828 sec 0.19688 0.0058594 sec 0.21799 0.0068359 sec 0.23039 0.0078125 sec 0.2336 0.0087891 sec 0.22751 0.0097656 sec0.079041 0.014648 SEC 0.034303⋮
S =1024×1复合物-0.0000 + 0.00000 i -0.0000 + 0.00000 i -0.0000 + 0.00000 i -0.0000 + 0.00000 i -0.0000 + 0.00000 i⋮
输出Y有包含差异信号的时间表吗年代是包含差分信号的幅度谱的矢量Y.
可视化TSA信号的差分信号和幅度谱
在这个例子中,Sinewaverectangularpulse.mat.包含由矩形脉冲调制的正弦波的数据。X是具有在60rpm的轴速度获得的调制正弦波数据的矢量。未调制的正弦波的频率为32 Hz和1.0单元的幅度。
加载数据,并绘制调制TSA信号的差分信号X.为了获得差分信号,指定频率为32hz in,滤除未调制的正弦波和调制信号的边带orderList.设置价值“域”到“频率”.
加载('sinewaverectangularpullemul.mat',“X”,“t”,'rpm','订单') tsadifference (X, t, rpm, orderList,“域”,“频率”);
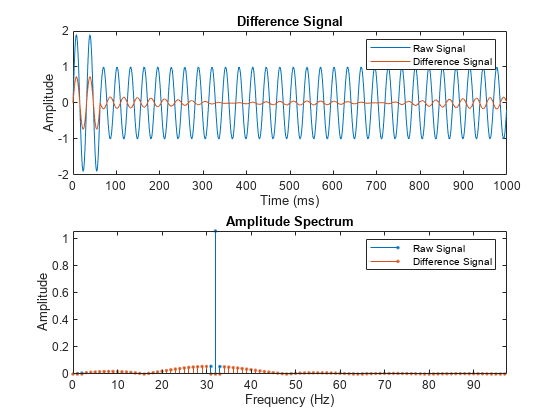
从图中,分别观察差分信号和原始信号的波形和幅值谱。观察差分信号包含了除了:
未经调制的正弦波在32 Hz
在31赫兹和33赫兹的未调制正弦波的一阶边带
输入参数
输出参数
算法
差分信号
差分信号由TSA信号计算,通过对信号频谱进行以下滤波:
轴频率及其谐波
齿轮啮合频率及其谐波
齿轮啮合频率的一阶边带及其谐波
可选地,在'中指定的边带
NumSidebands'在齿轮啮合频率及其谐波上
tsadifference使用带宽等于轴速度的三倍和值'NumSidebands,在感兴趣的频率附近进行计算Y运输安全管理局的信号。
幅度谱
差异信号的幅度谱如下计算,
这里,Y是差分信号。
参考
[1]麦克费登,警察局利用啮合振动时域平均信号处理的齿轮故障早期检测技术的检验Aero推进技术备忘录434.墨尔本,澳大利亚:航空研究实验室,1986年4月。
[2] Večeř, P., Marcel Kreidl, R. Šmíd。变速箱监测系统的状态指示器。Acta Polytechnica45.6(2005),第35-43页。
Zakrajsek, J. J., Townsend, D. P., and Decker, H. J.。应用于点蚀疲劳失效数据的齿轮故障检测方法分析技术备忘录105950.美国宇航局,1993年4月。
[4] Zakrajsek, James J。《齿轮啮合失效预测技术研究》。美国国家航空航天局克利夫兰OH刘易斯研究中心,1989年。不。nasa - e - 5049。
另请参阅
你也可以从以下列表中选择一个网站:
