逆运动学轨迹控制模型
此Simu金宝applink示例演示了逆运动学块可以沿指定的轨迹驱动机械手。所需的轨迹被指定为机械手末端执行器的一系列紧密间隔的姿势。轨迹生成和航点定义代表了许多机器人应用程序,如挑选和放置操作,从空间加速度和速度配置文件计算轨迹,甚至使用摄像机和计算机视觉模仿关键帧的外部观察。一旦产生轨迹,逆运动学块用于将其转换为关节空间轨迹,然后可以用于模拟操纵器和控制器的动态。
模型概述
加载模型以查看它是如何构建的。
open_system ('iktrajectorycontrolexample.slx');
该模型由四个主要操作组成:
目标姿势生成
逆运动学
操纵器动力学
姿态测量
目标姿势生成

这个状态流程图选择哪个航路点是操纵器的当前目标。一旦操纵器到达当前目标的容忍范围内,图表将目标调整到下一个航路点。图表还将路径点的组件转换和组装为齐次转换Eul2tform.功能。一旦没有更多的航点来选择,图表终止了模拟。
逆运动学
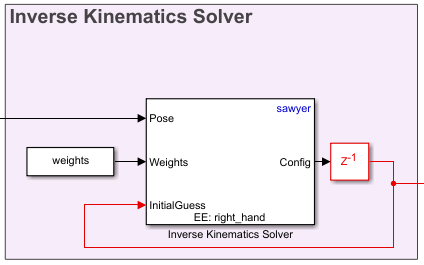
逆运动学计算一组关节角,以产生所需的姿态末端执行器。使用逆运动学与A.rigidBodyTree模型并指定终止效应的目标姿势作为均匀转化。为解决方案的位置和方向指定相对公差约束的一系列权重,并初始估计接头位置。该块输出具有从中产生所需姿势的接合位置的向量rigidBodyTree在块参数中指定的模型。为保证解的平滑连续性,将前面的配置解作为求解器的起始位置。金宝搏官方网站这也减少了计算的冗余,如果目标姿态没有更新自最后一个模拟时间步长。
操纵器动力学

操纵器动力学由两个组件组成,控制器产生扭矩信号和动力学模型,以考虑到这些扭矩信号的操纵器的动态。该示例中的控制器使用通过操纵器的逆动态计算的前馈组件和反馈PD控制器来纠正错误。操纵器的模型使用前进动力与rigidBodyTree目的。有关更复杂的动态和可视化技术,请考虑利用来自Control Systembox™SlockSet和Simscape Multibody™的工具来替换前向动态块。
姿态测量

姿势测量从操纵器模型中采用关节角度读数,并将它们转换成均匀的变换矩阵以用作反馈航点选择部分。
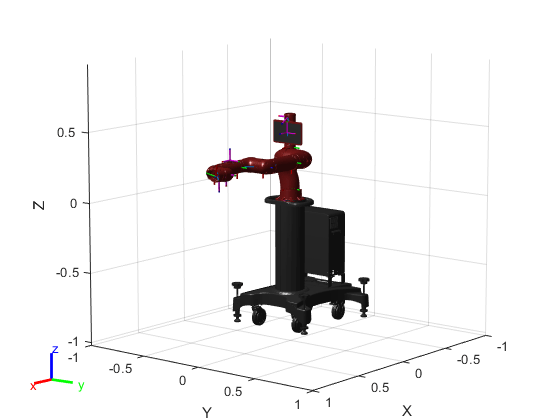
操纵器定义
用于此示例的机械手是Rethink Sawyer™机器人机械手。这rigidBodyTree描述操纵器的对象是从URDF(Unified Robot描述格式)文件导入的ImportRobot..
%将机械手导入刚性小组特对象Sawyer = ImportRobot(“sawyer.urdf”);索耶。DataFormat ='柱子';%定义终端效应器正文名称eeName ='右手';%定义了操纵器中的关节数numJoints = 8;%可视化机械手展示(Sawyer);XLIM([ - 1.00 1.00])ylim([ - 1.00 1.00]);Zlim([ - 1.02 0.98]);查看([128.88 10.45]);
航点一代
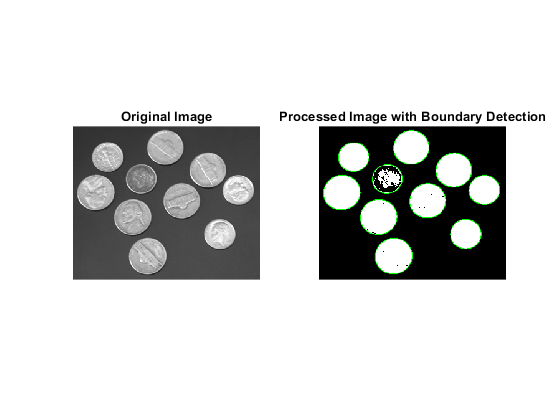
在这个例子中,机械手的目标是能够追踪出图像中检测到的硬币的边界,coins.png.首先,对图像进行处理,找到硬币的边界。
我= imread('coins.png');bwboundaries = imread('coinboundaries.png');图次要情节(1、2、1)imshow(我“边界”那'紧的') 标题('原始图像')子图(1,2,2)imshow(Bwboundaries,“边界”那'紧的') 标题(“具有边界检测的处理图像”)
图像处理后,提取硬币的边缘作为像素位置。数据是从mat文件加载进来的,边界数据.界限是一个小区阵列,其中每个单元包含描述单个检测边界的像素坐标的阵列。在示例中可以找到如何生成此数据的更全面的观点,“图像中的边界跟踪”(需要图像处理工具箱)。
加载naugulardata.mat.界限谁是界限
名称大小字节类属性边界10x1 25376 cell
要将此数据映射到世界框架,我们需要定义图像所在的位置以及像素坐标和空间坐标之间的缩放。
%图像原点坐标imageOrigin = (0.4, 0.2, 0.08);从像素转换为物理距离的%比例因子Scale = 0.0015;
每个点上期望的末端执行器方向的欧拉角也必须定义。
eeorientation = [0,pi,0];
在该示例中,选择方向,使得末端执行器总是垂直于图像的平面。
一旦定义了该信息,就可以将每组期望的坐标和欧拉角度编译成航点。每个航点表示为六元素向量,其前三个元素对应于所需xyz -操纵器在世界框架中的位置。最后三个元素对应于所需方向的Zyx欧拉角。
航点被连接到形成一个N-My-6阵列,在哪里N是轨迹中的总数。阵列中的每一行对应于轨迹中的航点。
%清除前一个航点并开始构建航点数组清晰的航点%刚刚开始于图像源waypt0 = [imageorigin + [0 0.2],eeorientation];触摸图像的原点waypt1 = [imageorigin,eeorientation];%插入每个元素,以便平滑地移动到图像的原点为了i = 1:6 Interp = linspace(waypt0(i),waypt1(i),100);航点(:,i)= interp';结尾
总共有10个硬币。对于像素性和速度,可以通过限制传递到航点的总数来跟踪较小的硬币子集。下面,NumTraces = 3个硬币在图像中追踪。
%定义痕迹的硬币数量numtraces = 3;%组装路线点以进行边界跟踪为了i = 1:min(numTraces, size(bounds,1))%选择边界并映射到物理大小段=边界{i} *比例;接近航点的%垫数据和边界之间的升力航点段=[段(1:);段(:,);段(,)):;% z轴偏移用于在边界之间移动段(1,3)= .02;段(结束,3)= .02;%转换为图像的起源cartesianCoord = imageOrigin +分段;%重复期望的方向以匹配添加的航点数eulerAngles = repmat (eeOrientation、大小(段,1),1);%附加数据到前一行机的结尾waypoints = [waypoints;Cartesiancoord,Eulerangles];结尾
此数组是模型的主要输入。
模型设置
在运行模型之前,必须初始化几个参数。
%初始化Q0大小,T = 0的机器人联合配置。这会%以后被第一航点代替。q0 = zeros(numjoints,1);%定义模拟的采样率。ts = .01;%定义了在方向上的相对权重的[1x6]向量逆运动学求解器的%位置误差。重量= =(1,6);%将第一个航点转换为均匀变换矩阵进行初始化inittargetpose = Eul2tform(航点(1,4:6));inittargetpose(1:3,结束)=航点(1,1:3)';%求解Q0,使得操纵器从第一航点开始本土知识= inverseKinematics ('刚性小组特雷'索耶);本土知识[q0 solInfo] = (eeName initTargetPose,权重q0);
模拟操纵器运动
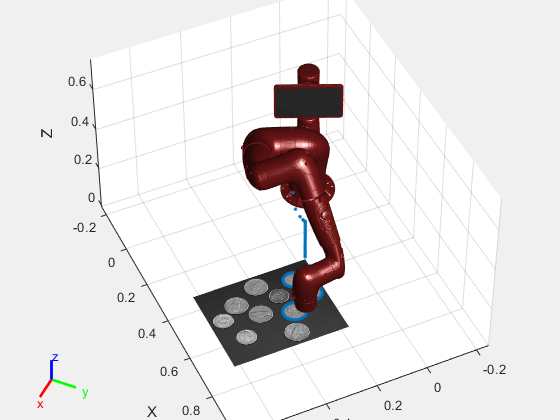
要模拟模型,请使用SIM命令。模型生成输出数据集,教育部并显示两个地块中的进展:
这x y plot.显示机械手的跟踪运动的自上而下视图。当操纵器从一个硬币轮廓过渡到下一个轮廓时,圆圈之间的线就会出现。
这路径跟踪plot以3D方式显示进程。绿色的点表示目标位置。红点表示末端执行器使用反馈控制实现的实际末端执行器位置。
%关闭目前开放的数字关闭所有%打开并模拟模型open_system ('iktrajectorycontrolexample.slx');sim卡('iktrajectorycontrolexample.slx');

可视化结果
该模型输出两个可以用于仿真后可视化的数据集。提供联合配置教育部.机器人末端执行器姿态输出为poseData.
%删除不必要的网格以获得更快的可视化clearmeshes(Sawyer);用于映射图像的%数据[m,n] =尺寸(i);[x,y] = meshgrid(0:m,0:n);x = imageorigin(1)+ x *比例;y = imageorigin(2)+ y * scale;z = zeros(尺寸(x));z = z + imageorigin(3);%关闭所有开放的数字关闭所有%初始化一个新的数字窗口数字;设置(GCF,“可见”那'上');%绘制初始机器人位置展示(Sawyer,Thepdata(1,:)');抓住在%初始化末端执行器绘图位置p = plot3(0,0,0,'。');经纱(x,y,z,i');%变化视图角度和轴视图(65,45)轴([ - 。 - 。25 1 -.25 .75 0 0.75])%迭代输出以10样本间隔,以可视化结果为了J = 1:10:长度(讲台)%显示机械手模型显示(索耶,jointData (j:) ','框架'那'离开'那“PreservePlot”, 错误的);%从同性恋变换输出中获得最终效应位置pos = poseData (1:3 4 j);%更新末端执行器位置p.XData = [p。XData pos(1)]; p.YData = [p.YData pos(2)]; p.ZData = [p.ZData pos(3)];%更新图drawn结尾

你也可以从以下列表中选择一个网站: