鲁棒稳定性,鲁棒性能和Mu分析
这个例子展示了如何使用鲁棒控制工具箱™来分析和量化反馈控制系统的鲁棒性。它还提供了与mu分析和mussv函数。
系统描述
图1显示了闭环系统的框图。工厂模式 是不确定的和工厂产量 在有干扰的情况下必须保持小 和测量噪声 .

图1:闭环系统的鲁棒性分析
干扰抑制和噪声不敏感性由性能目标量化
在哪里 和 权重函数是否反映的频率内容 和 .在这里 在低频率是大的吗 在高频率下是很大的。
Wd =补足重量的东西(。4,100 .15点);Wn =补足重量的东西(0.5,20100);bodemag (Wd,“b——”Wn,“g——”)标题(“性能权重函数”)传说(输入扰动的,测量噪声的)

创建不确定植物模型
不确定植物模型P是一个轻阻尼的二阶系统,分母系数具有参数不确定性,显著的频率相关的未建模动力学超过6 rad/s。其数学模型如下:
的参数k的不确定性约为40%,其名义值为16。在装置输入处,频率相关的不确定性假定在低频时约为30%,在10 rad/s时上升到100%,超过此值则更大。构建不确定植物模型P通过创造和组合不确定的元素:
k =尿素的(“k”, 16岁,“比例”, 30);δ= ultidyn (“δ”[1],“SampleStateDim”4);吴=补足重量的东西(0.3、10、20);P = tf(16,[1 0.16 k]) * (1+Wu*delta);
设计一个控制器
我们使用了实例“在保持开环特性的同时提高稳定性”所设计的控制器。这里使用的植物模型恰好是上面创建的不确定植物模型的名义价值。为了完整起见,我们重复用于生成控制器的命令。
K_PI = pid (0.8);K_rolloff = tf(1,[1/20 1]);Kprop = K_PI * K_rolloff;[negK, ~,伽马]= ncfsyn (P.NominalValue -Kprop);K = -negK;
关闭循环
使用连接建立闭环系统的不确定模型,如图1所示。命名进出每个区块的信号,并让它们进入连接做连接:
P.u =“了”;P.y =“yP”;K.u =“英国”;梁龙骥=“即”;S1 = sumblk ('uP = yK + D');S2 = sumblk ('uK = - yp - N');Wn。u =“n”;Wn。y =“N”;Wd。u =' d ';Wd。y =' D ';闭环=连接(磷、钾,S1, S2, Wn, Wd, {' d ',“n”},“yP”);
的变量闭环是一个具有两个输入和一个输出的不确定系统。它取决于两个不确定因素:实参数k以及一个不确定的线性时不变动态元素δ.
闭环
闭环=不确定连续时间状态空间模型,1输出,2输入,11状态。模型不确定性由以下块组成:delta:不确定1x1 LTI,峰值增益= 1,1次出现k:不确定实数,名义值= 16,变异性=[-30,30]%,1次出现NominalValue“查看标称值”,get(ClosedLoop)“查看所有属性”,以及“ClosedLoop. properties”。“不确定性”与不确定因素相互作用。
鲁棒稳定性分析
经典边缘allmargin对环路内的非结构化增益/相位变化具有良好的稳定性和鲁棒性。
allmargin (P.NominalValue * K)
ans =结构体字段:PMFrequency: [0.4471 3.1461 5.2318] DelayMargin: [3.1238 1.4443 0.2128] DMFrequency: [0.4471 3.1461 5.2318
对于所有的值,闭环系统是否保持稳定k,δ在上述范围内?回答这个问题需要更复杂的分析robstab函数。
[stabmarg, wcu] = robstab(闭环);stabmarg
stabmarg =结构体字段:LowerBound: 1.4679 UpperBound: 1.4709 CriticalFrequency: 5.8929
的变量stabmarg给出了上下限鲁棒稳定性裕度,用来衡量未来的不确定性k,δ反馈回路在变得不稳定之前可以容忍。例如,0.8的差值表明,只要指定的不确定性水平的80%就会导致不稳定。这里的边际是大约1.5,这意味着闭环将保持稳定高达150%的指定不确定性。
的变量wcu包含k和δ最接近它们的标称值,从而导致不稳定。
wcu
wcu =结构体字段:[1x1 ss] k: 23.0601
我们可以把这些值代入闭环并验证这些值导致闭环系统不稳定。
格式短e极(usubs(闭环,wcu))
注意,不稳定闭环极点的固有频率为stabmarg。CriticalFrequency:
stabmarg。CriticalFrequency
ans = 5.8929 e + 00
与Mu分析的联系
结构奇异值,或
的数学工具robstab计算鲁棒稳定裕度。如果您习惯于结构化奇异值分析,您可以使用mussv函数直接计算作为频率函数的mu,并重现上述结果。这个函数mussv是所有健壮性分析命令的底层引擎。
使用mussv,我们首先提取(δM)不确定闭环模型的分解闭环,在那里δ为(归一化)不确定元素的块对角矩阵。的第三个输出参数lftdata,BlkStruct的块对角结构δ可以直接使用mussv
[M,δ,BlkStruct] = lftdata(闭环);
为了进行鲁棒稳定性分析,只有米与不确定性相关的通道被使用。的行/列大小δ,选择适当的列和行米.记住δ对应于的列米,反之亦然。因此,的列维数δ用于指定米:
szDelta =大小(δ);M11公路= M (1: szDelta (2), 1: szDelta (1));
在其最简单的形式中,mu分析是在有限的频率网格上进行的。选择一个对数间隔频率点的矢量,并评估的频率响应M11公路通过这个频率网格。
50ω= logspace(1、2);M11_g =朋友(M11公路ω);
计算μ(M11公路)在这些频率处,并绘制出结果的上下边界:
mubnds = mussv (M11_g BlkStruct,“年代”);LinMagopt = bodeoptions;LinMagopt。PhaseVisible =“关闭”;LinMagopt。XLim = [1e-1 1e2];LinMagopt。MagUnits =“abs”;bodeplot (mubnds (1, 1), mubnds(1、2),LinMagopt);包含(的频率(rad /秒));ylabel (“μ上/下界限”);标题(“稳健稳定边际Mu图(倒比例尺)”);
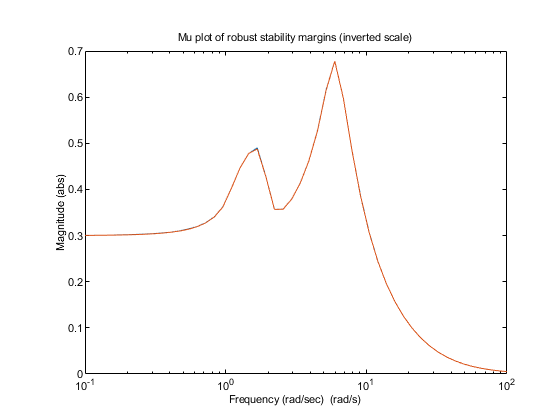
图3:鲁棒稳定边际图(倒比例尺)
鲁棒稳定裕度是结构奇异值的倒数。因此上界mussv成为稳定性边界的下界。进行这些转换,找到mu上限峰值处的不稳定频率(即稳定裕度最小的地方):
[pkl, wPeakLow] = getPeakGain (mubnds(1、2);(北大)= getPeakGain (mubnds (1,1));SMfromMU。下界= 1 /北大;SMfromMU。UpperBound = 1 / pkl;SMfromMU。CriticalFrequency = wPeakLow;
比较SMfromMU的界限stabmarg计算与robstab.这些价值大致一致robstab利润率略有下降。这是因为robstab采用一种比频率网格更复杂的方法,可以准确地计算出峰值μ在频率。
stabmarg
stabmarg =结构体字段:下界:1.4679e+00上界:1.4709e+00临界频率:5.8929e+00
SMfromMU
SMfromMU =结构体字段:LowerBound: 1.4747e+00 upper: 1.4747e+00 CriticalFrequency: 5.9636e+00
鲁棒性能分析
为不确定元素的标称值k和δ时,闭环增益小于1:
getPeakGain (ClosedLoop.NominalValue)
ans = 9.8050 e-01
这表示控制器K满足抗干扰和噪声不敏感的目标。但是,在模型的不确定性面前,这种名义上的表现能够维持吗?这个问题最好用robgain.
选择= robOptions (“显示”,“上”);[perfmarg, wcu] = robgain(闭环,1,选择);
计算峰……完成百分比:100/100性能级别1对于模型的不确定性不可靠。—对于高达39.7%的建模不确定性,增益仍然低于1。—模型中有39.8%的不确定性存在严重干扰。——这个扰动导致在频率0.129 rad/秒的增益为1。
答案是否定的:robgain发现一个摄动只相当于指定不确定性的40%,从而驱动闭环增益为1。
wcu getPeakGain (usubs(闭环),1 e-6)
ans = 1.0000 e + 00
这表明闭环增益将超过1 100%指定的不确定性。这是通过计算最坏情况的增益来确定的:
wcg = wcgain(闭环)
wcg =结构体字段:下界:1.5719e+00上界:1.5751e+00临界频率:5.9567e+00
最坏情况下的收益约为1.6。分析表明,当控制器K满足标称装置的干扰抑制和噪声不敏感性目标,它不能在指定的装置不确定性水平上保持这一性能水平。
另请参阅
相关的例子
更多关于
你也可以从以下列表中选择一个网站: