使用基本的ROS消息
消息是用于在ROS中交换数据的主容器。主题和服务使用消息来携带节点之间的数据。(看与ROS发布者和订阅者交换数据和呼叫并提供ROS服务有关主题和服务的更多信息)
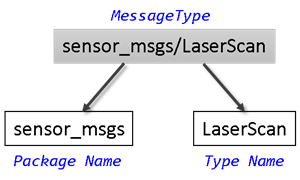
为了标识其数据结构,每个消息都有一个消息类型.例如,来自激光扫描仪的传感器数据通常以类型的消息发送sensor_msgs /提升.每个消息类型都标识消息中包含的数据元素。每个消息类型名称是包名称的组合,后跟正斜杠/,以及类型名称:
MATLAB®支金宝app持许多在机器人应用程序中常常遇到的ROS消息类型。此示例显示了在MATLAB中创建,探索和填充ROS消息的一些方法。
发现消息类型
初始化ROS主节点和全局节点。
rosinit
启动ROS核心......在0.67725秒内完成。初始化ROS Master http://192.168.0.10:56046。使用nodeUri初始化全局节点/ matlab_global_node_55235 http:// bat1073817glnxa64:36827 /
使用examplehelperroscreatesamplenetwork用三个额外的节点以及示例发布者和订阅者填充ROS网络。
examplehelperroscreatesamplenetwork
网络上有各种节点,具有少数主题和附属发布商和订阅者。
您可以通过致电查看可用主题的完整列表rostopic列表.
rostopic列表
/姿势/ rosout / scan / tf
属性发送的数据类型的更多信息/扫描主题,使用叛逆的信息命令检查它。/扫描有一个消息类型sensor_msgs /提升.
rostopic信息/扫描
类型:Sensor_msgs / Laserscan发布商:* / node_3(http:// bat1073817glnxa64:33107 /)订阅者:* / node_1(http:// bat1073817glnxa64:33265 /)* / node_2(http:// bat1073817glnxa64:41767 /)
命令输出还会告诉您哪些节点正在发布和订阅主题。要了解出版商和订阅者,请参阅呼叫并提供ROS服务.
要了解有关主题的消息类型的更多信息,请使用“使用相同类型的空消息”Rosmessage.功能。Rosmessage.金宝app支持消息类型的TAB补全。要完成消息类型名称,请键入要完成的名称的前几个字符,然后按选项卡关键。
Scandata = Rosmessage(“sensor_msgs /提升”)
Scandata = ROS Laserscan带有属性的消息:messageType:'sensor_msgs / laserscan'标题:[1x1 header] angleemin:0 AngleMax:0 AnslIncrement:0临时扫描:0扫描:0 RangeMin:0 RangeMax:0范围:[0x1单个]强度:[0x1单个]使用ShowDetail来显示消息的内容
创建的消息scandata具有与通常从激光扫描仪接收的数据相关联的许多属性。例如,最小感测距离存储在RangeMin属性,最大感知距离在RangeMax.
要查看可用于主题和服务的所有消息类型的完整列表,请使用rosmsg列表.
探索消息结构并获取消息数据
ROS消息是对象,消息数据存储在属性中。MATLAB提供方便的方法来查找和探索消息的内容。
如果你订阅
/构成主题,您可以接收和检查发送的消息。
Poseub = Rossubscriber('/姿势')
Poseub =具有属性的订阅者:主题名称:'/ pose'最新名:[0x1 twist] messageType:'geometry_msgs / twist'buffersize:1 newmessagefcn:[] dataformat:'对象'
使用收到从订阅者获取数据。一旦接收到新消息,函数将返回该消息并将其存储在posedata变量(第二个参数是以秒为单位的超时)。
Postata =接收(姿态,10)
Postata = ROS Twist Message具有属性:MessageType:'Geometry_msgs / Twist'线性:[1x1 Vector3] Angular:[1x1 Vector3]使用ShowDetail来显示消息的内容
该消息有一种类型geometry_msgs /扭.消息中还有其他两个属性:线性和角.你可以通过直接访问这些消息属性来查看它们的值:
posedata.linear.linear.
ANS = ROS Vector3带有属性的消息:MessageType:'Geometry_msgs / Vector3'x:0.0315 Y:0.0406 z:-0.0373使用ShowDetail来显示消息的内容
postata.angular.angular.
ANS = ROS Vector3带有属性的消息:messageType:'Geometry_msgs / Vector3'x:0.0413 Y:0.0132 Z:-0.0402使用ShowDetail来显示消息的内容
这些消息字段的每个值实际上是自身的消息。这些消息类型是geometry_msgs / Vector3.geometry_msgs /扭是由两个组成的综合消息geometry_msgs / Vector3消息。
这些嵌套消息的数据访问与访问其他消息中的数据完全相同。访问X组件的线性使用此命令的消息:
xpos = posedata.Linear.X
xpos = 0.0315
如果您想要快速摘要消息中包含的所有数据,请调用Rosshowdetails.功能。显示详细资料可处理任何类型的消息,并递归显示所有消息数据属性。
showdetails(posedata)
线性X:0.03147236863931789 Y:0.04057919370756193 Z:0.0.03730131837064939 Angular X:0.04113758561390194 Y:0.013235924622540959905
显示详细资料在调试期间和希望快速浏览消息内容时提供帮助。
设置消息数据
您还可以设置Message属性值。使用类型创建消息geometry_msgs /扭.
twist = rosmessage('geometry_msgs / twist')
Twist = ROS Twist Message具有属性:MessageType:'Geometry_msgs / Twist'线性:[1x1 Vector3] Angular:[1x1 Vector3]使用ShowDetail来显示消息的内容
此消息的数值属性初始化为0.默认。您可以修改此消息的任何属性。设定线性的。Y条目相当于5..
twist.linear.y = 5;
查看消息数据以确保您的更改生效。
twist.linear.
ans = ROS Vector3 message with properties: MessageType: 'geometry_msgs/Vector3' X: 0 Y: 5 Z: 0使用showdetails显示消息的内容
填充数据后,您可以使用发布者,订阅者和服务使用它。看看与ROS发布者和订阅者交换数据和呼叫并提供ROS服务的例子。
复制消息
复制消息内容有两种方法:
你可以创建一个参考副本原始信息共享相同的数据。
你可以创建一个深拷贝。深度副本,其中副本和原始邮件每个都有自己的数据。
如果想要在不同的函数或对象之间共享消息数据,引用副本是有用的,而如果想要消息的独立副本,则需要深度副本。
做一个参考副本通过使用的消息=符号。这将创建一个可变的变量,将与原始变量相同的消息内容引用。
twistCopyRef =扭
Twist message with properties: MessageType: 'geometry_msgs/Twist' Linear: [1x1 Vector3] Angular: [1x1 Vector3]使用showdetails显示消息的内容
修改线性的。Z现场Twistcopyref..这也改变了内容转折。
twistcopyref.linear.z = 7;twist.linear.
ans = ROS Vector3 message with properties: MessageType: 'geometry_msgs/Vector3' X: 0 Y: 5 Z: 7使用showdetails显示消息的内容
做一个深拷贝扭这样您就可以在不影响原始数据的情况下更改其内容。制造一个新的信息,TwistcopyDeep., 使用复制功能:
TwistcopyDeep = Copy(Twist)
TwistCopyDeep = ROS Twist Message具有属性:MessageType:'Geometry_msgs / Twist'线性:[1x1 Vector3] Angular:[1x1 Vector3]使用ShowDetail来显示消息的内容
修改线性的。X财产TwistcopyDeep..内容扭保持不变。
twistCopyDeep.Linear.X = 100;twistCopyDeep。线性
ANS = ROS Vector3带有属性的消息:messageType:'geometry_msgs / vector3'x:100 y:5 z:7使用showdetail来显示消息的内容
twist.linear.
ans = ROS Vector3 message with properties: MessageType: 'geometry_msgs/Vector3' X: 0 Y: 5 Z: 7使用showdetails显示消息的内容
保存和加载消息
您可以保存消息并存储内容以供以后使用。
从订阅者获取一条新消息。
Postata =接收(姿态,10)
Postata = ROS Twist Message具有属性:MessageType:'Geometry_msgs / Twist'线性:[1x1 Vector3] Angular:[1x1 Vector3]使用ShowDetail来显示消息的内容
使用MATLAB保存姿态数据到MAT文件保存功能。
保存(“posedata.mat”那'postata')
在将文件加载回工作区之前,清除posedata多变的。
清晰的posedata
现在您可以通过调用来加载消息数据加载功能。这加载了posedata从上面进入messageData结构体。posedata是结构的数据字段。
messageData =负载(“posedata.mat”)
Messageata =.结构体字段:Postata:[1x1扭曲]
检查messageData.posedata查看消息内容。
messageData.posedata
ANS = ROS扭曲消息具有属性:messageType:'geometry_msgs / twist'线性:[1x1 vector3] Angular:[1x1 Vector3]使用ShowDetail来显示消息的内容
现在可以删除MAT文件。
删除(“posedata.mat”)
消息中的对象数组
来自ROS的一些消息存储在对象数组.这些必须与典型的数据阵列不同地处理。
在您的工作区中,变量TF.包含一个示例消息。(examplehelperroscreatesamplenetwork脚本创建了变量。)在这种情况下,它是一种类型的消息tf / tfmessage用于坐标转换。
TF.
tf = ROS tfMessage message with properties: MessageType: 'tf/tfMessage
TF.有两个字段:MessageType.包含标准数据阵列,和转换包含一个对象数组。存储了53个对象转换,所有这些都具有相同的结构。
扩张TF.在转换要看结构:
tf.transforms.
ans = 53x1 ROS TransformStamped消息数组的属性:MessageType Header Transform ChildFrameId
每个对象转换有四个属性。你可以扩展到查看变换现场转换.
tformFields = tf.Transforms.Transform
笔记:命令输出返回53个单个答案,因为每个对象都被评估并返回其值变换场地。此格式并不总是有用的,因此您可以使用以下命令将其转换为单元格数组:
cellTransforms = {tf.Transforms.Transform}
cellTransforms =1×53单元阵列列1到4 {1x1变换} {1x1变换} {1x1变换}列5到8 {1x1变换} {1x1变换} {1x1变换} {1x1变换}列9到12 {1x1变换} {1x1变换} {1x1变换} {1x1变换}列13到16 {1x1变换} {1x1变换} {1x1变换}列17到20 {1x1变换} {1x1变换} {1x1变换} {1x1变换} {1x1变换}列21到24 {1x1变换} {1x1变换} {1x1变换}列25到28 {1x1变换} {1x1变换} {1x1变换} {1x1变换} {1x1变换}列29到32 {1x1变换} {1x1变换} {1x1变换} {1x1变换}列33到36 {1x1变换} {1x1变换} {1x1变换}列37到40 {1x1变换} {1x1变换} {1x1变换} {1x1变换} {1x1变换}列41到44 {1x1变换} {1x1变换} {1x1变换}列45到48 {1x1变换} {1x1变换} {1x1变换} {1x1变换}列49到52 {1x1变换} {1x1变换} {1x1变换} {1x1变换}列53 {1x1变换}
这将所有53个对象条目放在单元格数组中,使您可以使用索引访问它们。
此外,您可以访问对象数组元素,同样访问标准MATLAB向量:
tf.transforms(5)
ANS = ROS转换器具有属性的消息:MessageType:'Geometry_msgs / transformsed'标题:[1x1标题]变换:[1x1变换] shinkframeID:'/ imu_link'使用showdetail来显示消息的内容
访问53列表中第五次转换的翻译组件:
tf.Transforms .Transform.Translation (5)
ans = ROS Vector3 message with properties: MessageType: 'geometry_msgs/Vector3' X: 0.0599 Y: 0 Z: -0.0141使用showdetails显示消息的内容
关闭ROS网络
从ROS网络删除样本节点,发布者和订阅者。
exampleHelperROSShutDownSampleNetwork
关闭ROS主站并删除全局节点。
Rosshutdown.
使用nodeuri关闭全局节点/ matlab_global_node_55235 http:// bat1073817glnxa64:36827 /关闭ros master http://192.168.0.0.10:56046。
下一个步骤
看处理专门的ROS信息有关处理图像,点云和激光扫描消息的示例。
对于应用程序示例,请参阅开始使用Gazebo和一个模拟乌龟机器人或开始使用真正的乌龟机器人的例子。
你也可以从以下列表中选择一个网站: