主要内容
莫奈德
为模态分析生成稳定图
描述
FN.=模态(___)FN.,确定为连续的模型订单之间是稳定的。的一世第一个元素包含长度-一世稳定的杆的自然频率传染媒介。不稳定的杆返回为南该语法接受来自以前语法的任何输入组合。
例子
MIMO稳定图
计算由随机噪声激发的两输入/双输出系统的频率响应函数。
加载数据文件。使用5000样本HANN窗口计算频率响应函数,在邻接数据段之间的50%重叠。指定输出测量是位移。
加载modaldata.winlen = 5000;润扬悬索桥[f] = modalfrf (Xrand Yrand, fs,损害(winlen), 0.5 * winlen,'传感器'那'DIS');
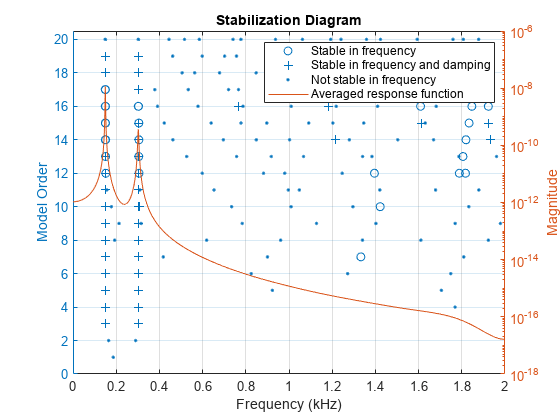
生成一个稳定图来识别多达20种物理模式。
Modalsd(FRF,F,FS,'maxmodes', 20)
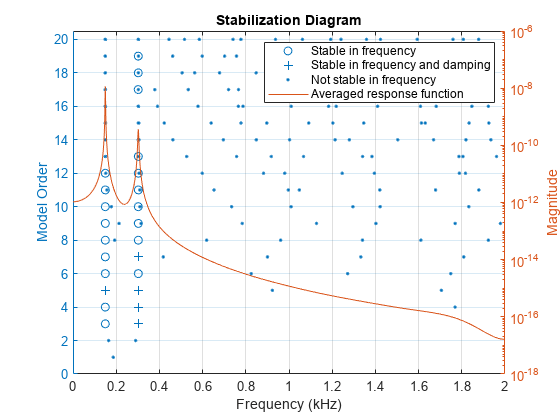
重复计算,但现在收紧稳定性的标准。将给定极点分类为频率稳定,如果其自然频率会在模型顺序增加时变化小于0.01%。如果模型顺序增加,如果阻尼比率估计减少,则将给定极点分类为稳定的阻尼,因为模型顺序增加。
Modalsd(FRF,F,FS,'maxmodes'20,'screteria'[1军医0.002])
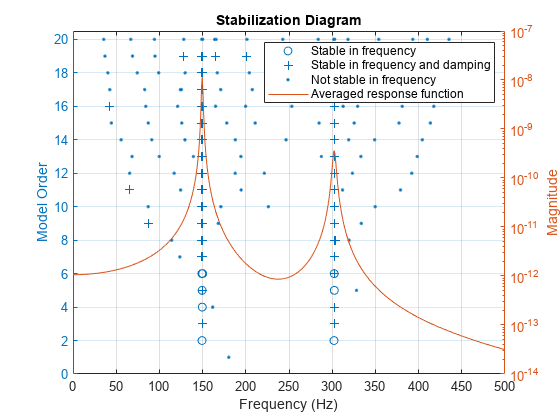
设置频率范围为0 ~ 500hz。将稳定标准放宽到0.5%的频率和10%的阻尼。
Modalsd(FRF,F,FS,'maxmodes'20,'screteria',[5e-3 0.1],'freqrange',[0 500])
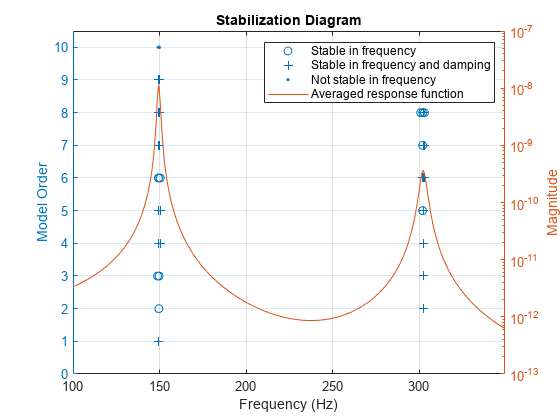
使用最小二乘有理函数算法重复计算。频率限制在100hz ~ 350hz,最多可识别10种物理模式。
Modalsd(FRF,F,FS,'maxmodes'10,'freqrange'(100 350),'fitmethod'那“lsrf”)
输入参数
输出参数
参考文献
[1]布兰德,安德斯。噪声和振动分析:信号分析和实验程序.奇切斯特,英国:John Wiley & Sons, 2011。
[2] Ozdemir, Ahmet Arda和Suat Gumussoy。基于向量拟合的系统识别工具箱中的传递函数估计国际自动控制联合会第20届世界大会的诉讼程序,图卢兹,法国,2017年7月。
[3] Vold, Håvard, John Crowley和G. Thomas Rocklin。估计频率响应函数的新方法声音和振动.第18卷,1984年11月,34-38页。
在R2017A介绍
你也可以从以下列表中选择一个网站:
