modalfrf.
模态分析的频率响应函数
句法
描述
modalfrf(___)没有输出参数在当前图中绘制频率响应函数。该地块仅限于前四个激励和四个反应。
例子
锤励磁频率响应函数
可视化单输入/单输出锤激励的频率响应功能。
加载包含的数据文件:
Xhammer.输入激励信号由周期性地传送的五个锤击搅动。yhammer.系统对输入的响应。yhammer.被测量为位移。
信号以4 kHz采样。绘制激励和输出信号。
加载modaldata.子图(2,1,1)绘图(叮文,Xhammer(:))ylabel('力量(n)')子图(2,1,2)绘图(叮嘱,Yhammer(:))ylabel('位移(m)')xlabel('时间'')
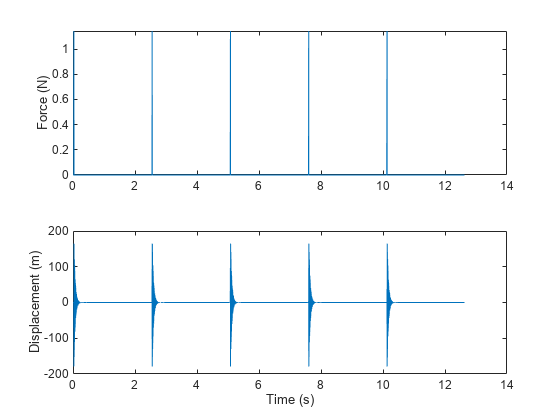
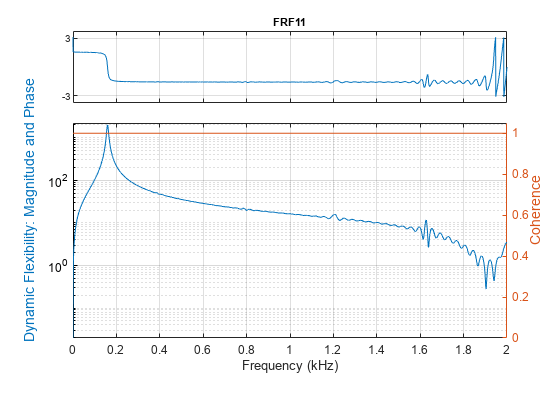
计算并显示频率响应函数。使用矩形窗口窗口信号。指定窗口覆盖锤子之间的时间。
CLF Winlen =尺寸(Xhammer,1);modalfrf(xhammer(:),yhammer(:),fs,winlen,'传感器'那'DIS')
MIMO频率响应函数
计算由随机噪声激发的两输入/双输出系统的频率响应函数。
加载包含的数据文件Xrand.,输入励磁信号,和yrand.,系统响应。使用5000样本HANN窗口计算频率响应函数,在邻接数据段之间的50%重叠。指定输出测量是位移。
加载modaldata.Winlen = 5000;FRF = Modalfrf(Xrand,Yrand,FS,HANN(Winlen),0.5 * Winlen,'传感器'那'DIS');
使用绘图功能modalfrf.可视化响应。
Modalfrf(Xrand,Yrand,FS,Hann(Winlen),0.5 * Winlen,'传感器'那'DIS')

SISO系统的频率响应函数
估计简单的单输入/单输出系统的频率响应函数,并将其与定义进行比较。
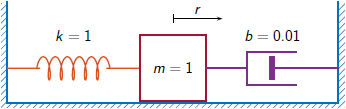
一维离散时间振荡系统由单元质量组成, ,用弹性常数的弹簧连接到墙壁上 。传感器样本质量的位移 赫兹。通过施加与速度成比例的力,阻尼器阻碍质量的运动,随着速度的阻尼恒定 。
生成3000个时间样本。定义采样间隔 。
FS = 1;dt = 1 / fs;n = 3000;t = dt *(0:n-1);b = 0.01;
系统可以由状态空间模型描述
在哪里 是国家矢量, 和 分别是质量的位移和速度, 是驱动力,而且 是测量的输出。状态空间矩阵是
是个 标识和连续时间空间矩阵是
AC = [0 1; -1-3];A = EXPM(AC * DT);BC = [0; 1];B = AC \(A-EYE(2))* BC;c = [1 0];d = 0;
质量由前2000秒的随机输入驱动,然后留下返回休息。使用状态空间模型从零零初始状态开始计算系统的时间演变。绘制质量的位移作为时间的函数。
RNG.默认U = RANDN(1,N)/ 2;U(2001:结束)= 0;y = 0;x = [0; 0];为了k = 1:n y(k)= c * x + d * u(k);x = a * x + b * u(k);结尾情节(t,y)

估计系统的模态频率响应功能。只要测量的信号,使用Hann窗口一半。指定输出是质量的位移。
风=汉恩(N / 2);[FRF,F] = Modalfrf(U',Y',FS,Wind,'传感器'那'DIS');
离散时间系统的频率响应函数可以表示为系统的时域传递函数的z变换,在单位圆圈中评估。比较modalfrf.估计定义。
[B,A] = SS2TF(A,B,C,D);NFS = 2048;FZ = 0:1 / NFS:1 / 2-1 / NFS;z = exp(2j * pi * fz);ZTF = Polyval(B,Z)./ Polyval(A,Z);绘图(F,20 * log10(ABS(FRF)))保持在绘图(FZ * FS,20 * log10(ABS(ZTF)))保持离开网格ylim([ - 60 40])

估计振动模式的固有频率和阻尼比。
[Fn,DR] = ModalFit(FRF,F,FS,1,'fitmethod'那'pp')
FN = 0.1593.
DR = 0.0043.
比较自然频率 ,这是无法拆除系统的理论值。
Theo = 1 /(2 * Pi)
Theo = 0.1592.
双体振荡器的模态参数
估计简单的多输入/多输出系统的频率响应函数和模态参数。
理想的一维振荡系统由两个群众组成, 和 ,限制在两个墙之间。单位是这样的 和 。每个质量通过弹簧连接到最近的墙壁上,弹簧具有弹性常数 。相同的弹簧连接两个肿块。通过施加成比例的速度,三个阻尼器妨碍了肿块的运动,阻尼恒定 。传感器样本 和 ,群众的位移,在 赫兹。

生成30,000个时间样本,相当于600秒。定义采样间隔 。
FS = 50;dt = 1 / fs;n = 30000;t = dt *(0:n-1);
系统可以由状态空间模型描述
在哪里 是国家矢量, 和 分别是位置和速度 群众, 是输入驱动力的矢量,和 是输出矢量。状态空间矩阵是
是个 标识和连续时间空间矩阵是
放 那 , 和 。
k = 400;b = 0.1;m = 1/10;AC = [0 1 0 0; -2 * k -2 * b k b; 0 0 0 1; k / m b / m -2 * k / m -2 * b / m];A = EXPM(AC * DT);BC = [0 0; 1 0; 0 0; 0 1 / m];B = AC \(A-EYE(4))* BC;C = [1 0 0 0; 0 0 1 0];d =零(2);
群众通过整个测量的随机输入驱动。使用状态空间模型从零零初始状态开始计算系统的时间演变。
RNG.默认U = Randn(2,N);y = [0; 0];x = [0; 0; 0; 0];为了kk = 1:n y(:,kk)= c * x + d * u(:,kk);x = a * x + b * u(:,kk);结尾
使用输入和输出数据估计系统的传送功能作为频率的函数。使用15000样本的Hann窗口,在相邻的段之间具有9000个重叠样本。指定测量的输出是位移。
风=汉恩(15000);nove = 9000;[FRF,F] = Modalfrf(U',Y',FS,Wind,Nove,'传感器'那'DIS');
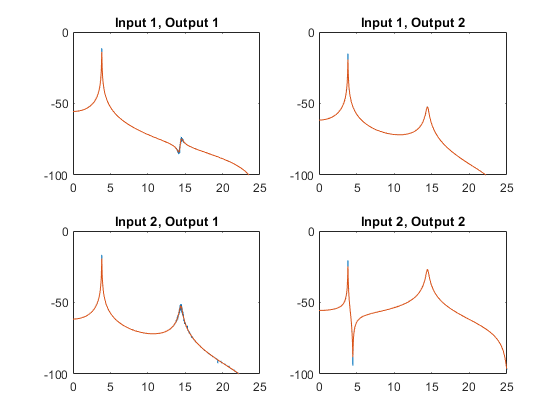
将理论传递函数计算为时域传输函数的z变换,在单位圆圈中进行评估。
NFS = 2048;FZ = 0:1 / NFS:1 / 2-1 / NFS;z = exp(2j * pi * fz);[B1,A1] = SS2TF(A,B,C,D,1);[B2,A2] = SS2TF(A,B,C,D,2);FRF(1,:,1)= Polyval(B1(1,:),Z)./ Polyval(A1,Z);FRF(1,:,2)=多瓦(B1(2,:),Z)./ Polyval(A1,Z);FRF(2,:,1)= Polyval(B2(1,:),z)./ Polyval(A2,Z);FRF(2,:,2)= Polyval(B2(2,:),Z)./ Polyval(A2,Z);
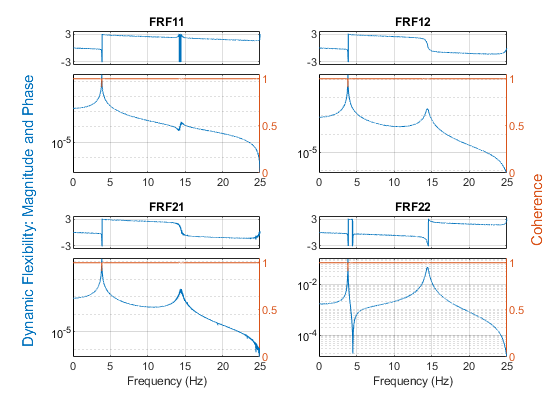
绘制估计并覆盖理论预测。
为了JK = 1:2为了KJ = 1:2子图(2,2,2 *(JK-1)+ KJ)图(F,20 * log10(ABS(FRF(:,JK,KJ))))在图(FZ * FS,20 * log10(ABS(FRF(JK,:,KJ)))))保持离开轴([0 fs / 2 -100 0])标题(Sprintf('输入%d,输出%d',jk,kj))结尾结尾
使用语法绘制估计modalfrf.没有输出参数。
图modalfrf(U',Y',FS,Wind,Nove,'传感器'那'DIS')
估计系统的自然频率,阻尼比率和模式形状。使用峰值拣选方法进行计算。
[Fn,DR,MS] = ModalFit(FRF,F,FS,2,'fitmethod'那'pp');FN.
Fn = Fn(:,:,1)= 3.8466 3.8466 3.8495 3.8495 3.8495 3.8495 FN(:,:2)= 3.8492 3.8490 3.8552 3.8552 14.4684
将自然频率与稳定系统的理论预测进行比较。
undlamed = sqrt(eig([2 * k-k; -k / m 2 * k / m]))/ 2 / pi
undamped =2×13.8470 14.4259
使用子空间方法的频率响应函数
计算与钢框架相对应的两输入/六输出数据集的频率响应函数。
负载包含输入激励和输出加速度计测量的结构。该系统以1024 Hz采样约3.9秒。
加载modaldata.钢架x = steelframe.input;y = steelframe.output;fs = steelframe.fs;
使用子空间方法计算频率响应函数。将输入和输出信号划分为非传递,1000个样本段。窗口使用矩形窗口窗口每个段。指定模型顺序为36。
[FRF,F] = Modalfrf(x,y,fs,1000,'估计'那'子空间'那'命令',36);
可视化系统的稳定图。确定最多15种物理模式。
Modalsd(FRF,F,FS,'maxmodes'15)

输入参数
输出参数
参考
[1] Brandt,Anders。噪声和振动分析:信号分析和实验程序。奇切斯特,英国:John Wiley&Sons,2011年。
[2] vold,håvard,约翰·克劳利和G. Thomas Rocklin。“估计频率响应函数的新方法。”声音和振动。卷。1984年11月18日,第34-38页。
也可以看看
modalfit.|莫奈德|est|n4sid.(系统识别工具箱)
话题
- 识别模型的模态分析
- 系统识别概述(系统识别工具箱)
- 系统识别工作流程(系统识别工具箱)
- 金宝app支持的连续和离散时间模型(系统识别工具箱)
您还可以从以下列表中选择一个网站:
