modalfit.
频率响应函数的模态参数
句法
描述
例子
SISO系统的频率响应函数
估计一个简单的单输入/单输出系统的频响函数,并将其与定义进行比较。
一维离散时间振动系统由一个单位质量, 它由一个带有弹性常数的弹簧固定在墙上 .传感器样本质量的位移 赫兹。阻尼器通过施加一个与速度成比例的力,以阻尼常数阻碍物体的运动 .
生成3000个时间样本。定义采样间隔 .
Fs = 1;dt = 1 / f;N = 3000;t = dt * (0: n - 1);b = 0.01;
系统可以用状态空间模型来描述
在哪里 为状态向量, 和 分别为质量的位移和速度, 驱动力是,和 为测量输出。状态空间矩阵为
是 和连续时间状态空间矩阵
c = [0 1;-1];一个= expm (Ac * dt);公元前= [0,1];Ac \ B =(。(2)公元前*;C = [1 0];D = 0;
质量由前2000秒的随机输入驱动,然后留下返回休息。使用状态空间模型从零零初始状态开始计算系统的时间演变。绘制质量的位移作为时间的函数。
rng默认的u = randn (1, N) / 2;u(2001:结束)= 0;y = 0;x = (0, 0);为了k = 1:N y(k) = C*x + D*u(k);x = A*x + B*u(k);结束情节(t, y)

估计系统的模态频响函数。使用汉恩窗口的长度是被测信号的一半。指定输出是物体的位移。
风=损害(N / 2);润扬悬索桥[f] = modalfrf (u ' y ', Fs,风,“传感器”那'DIS');
离散时间系统的频响函数可以表示为系统时域传递函数在单位圆处的z变换。比较modalfrf用定义进行估计。
[b] = ss2tf (a, b, C, D);nfs = 2048;fz = 0:1 / nfs: 1/2-1 / nfs;z = exp (2 j *π* fz);ztf = polyval (b, z)。/ polyval (a, z);情节(f, 20 * log10 (abs(降维)))在情节(fz * Fs, 20 * log10 (abs (ztf)))从网格ylim (40 [-60])

估计振动模式的固有频率和阻尼比。
[Fn,DR] = ModalFit(FRF,F,FS,1,'fitmethod'那'pp')
fn = 0.1593
DR = 0.0043.
比较固有频率为 ,为无阻尼系统的理论值。
西奥= 1 /(2 *π)
Theo = 0.1592
使用最小二乘函数方法的模态参数
从频率响应函数(FRF)阵列开始计算空间站模块的模态参数。
加载包含三输入/三输出FRF阵列的结构。该系统以320 Hz进行采样。
负载modaldataSpaceStationFRF频= SpaceStationFRF.FRF;f = SpaceStationFRF.f;fs = SpaceStationFRF.Fs;
使用最小二乘函数方法提取最低24模式的模态参数。
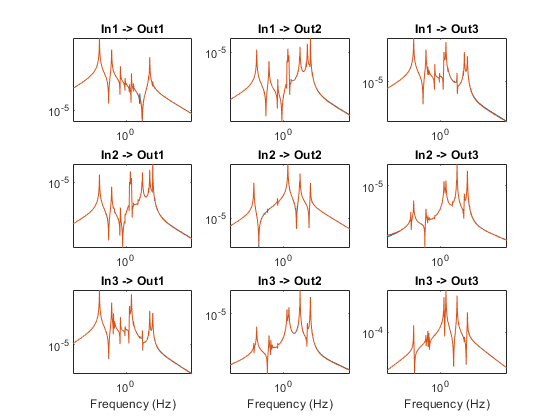
[fn,博士,女士,ofrf] = modalfit(润扬悬索桥,f, f, 24岁,'fitmethod'那“lsrf”);
将重建的频响阵列与实测频响阵列进行比较。
为了ij = 1:3为了JI = 1:3子图(3,3,3 *(IJ-1)+ JI)LOGLOG(F,ABS(FRF(:,ji,ij)))持有在loglog(f,abs(OFRF(:,ji,ij)))持有从轴紧标题(Sprintf('以%d - > out%d'ij,霁))如果ij = = 3包含(的频率(赫兹))结束结束结束
二体振荡器的模态参数
估计简单的多输入/多输出系统的频率响应函数和模态参数。
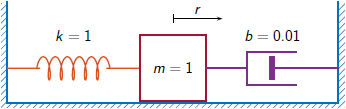
一个理想的一维振动系统由两个质量, 和 ,被限制在两堵墙之间。单位是这样的 和 .每个物体都由一个有弹性常数的弹簧连接到最近的壁上 .一个相同的弹簧把两个物体连接起来。三个阻尼器通过施加与速度成比例的力,以阻尼常数阻碍质量的运动 .传感器样品 和 ,质量的位移,在 赫兹。

生成30,000个时间样本,相当于600秒。定义采样间隔 .
Fs = 50;dt = 1 / f;N = 30000;t = dt * (0: n - 1);
系统可以用状态空间模型来描述
在哪里 为状态向量, 和 分别是位置和速度 th质量, 是输入驱动力的矢量,和 为输出向量。状态空间矩阵为
是 和连续时间状态空间矩阵
放 那 , .
k = 400;b = 0.1;m = 1/10;Ac = [0 1 0 0; 2 * 2 k * b k b; 0 0 0 1; k k / m / m b / m 2 * 2 * b / m];一个= expm (Ac * dt);Bc = [0 0;0 0;0 1/m];Ac \ B =(。(4)公元前*;C = [1 0 0 0;0 0 1 0];D = 0 (2);
在整个测量过程中,质量是由随机输入驱动的。使用状态空间模型从零零初始状态开始计算系统的时间演变。
rng默认的u = randn (2 N);y = (0, 0);x = (0, 0, 0, 0);为了N = y(:,kk) = C*x + D*u(:,kk);x = A*x + B*u(:,kk);结束
利用输入和输出数据估计系统的传递函数作为频率的函数。使用一个15000样本的Hann窗口,其中包含9000个相邻片段之间的重叠样本。指定测量的输出是位移。
风=损害(15000);小说= 9000;润扬悬索桥[f] = modalfrf (u ' y ', Fs,风,小说,“传感器”那'DIS');
计算理论传递函数作为时域传递函数的z变换,在单位圆处计算。
nfs = 2048;fz = 0:1 / nfs: 1/2-1 / nfs;z = exp (2 j *π* fz);(b1, a1) = ss2tf (A, B, C, D, 1);(b2 a2) = ss2tf (A, B, C, D, 2);频(1:1)= polyval (b1 (1:), z)。/ polyval (a1, z);频(1:2)= polyval (b1 (2:), z)。/ polyval (a1, z);频(2:1)= polyval (b2 (1:), z)。/ polyval (a2, z);频(2:2)= polyval (b2 (2:), z)。/ polyval (a2, z);
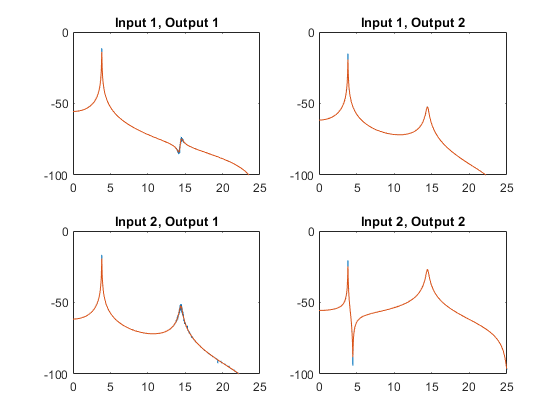
绘制估计并覆盖理论预测。
为了JK = 1:2为了kj = 1:2次要情节(2,2,2 * (jk-1) + kj)图(20 * log10 (abs(润扬悬索桥(kj jk:,))))在情节(fz * Fs, 20 * log10 (abs(润扬悬索桥(jk: kj))))从轴([0 Fs/2 -100 0]) title(sprintf('输入%d,输出%d'、jk kj))结束结束
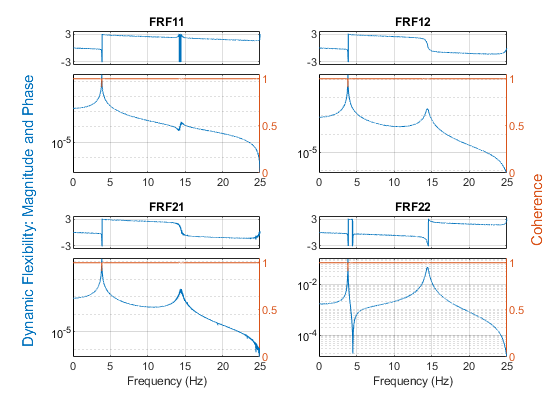
使用的语法绘制估计modalfrf没有输出参数。
图modalfrf (u ' y ', Fs,风,小说,“传感器”那'DIS')
估计系统的自然频率,阻尼比率和模式形状。使用峰值拣选方法进行计算。
[Fn,DR,MS] = ModalFit(FRF,F,FS,2,'fitmethod'那'pp');FN.
Fn = Fn (:,: 1) = 3.8466 3.8466 3.8495 3.8495
将自然频率与稳定系统的理论预测进行比较。
无阻尼=√(eig([2*k -k;-k/m 2*k/m]))/2/pi
无阻尼=2×13.8470 - 14.4259
MIMO系统的模态参数
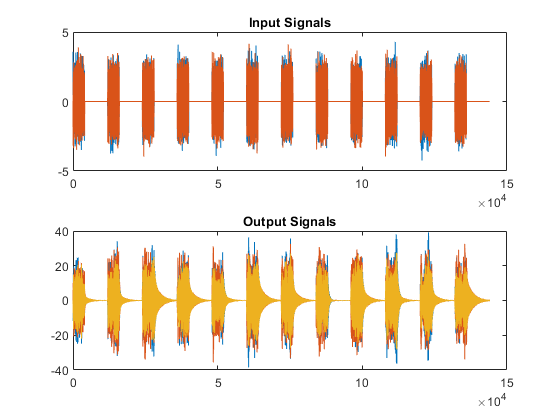
计算自然频率,阻尼比率,以及由几个随机噪声激发的两输入/三输出系统的形状。每个突发持续1秒钟,每个突发结束之间都有2秒钟和下一个开始。数据以4 kHz采样。
加载数据文件。绘制输入信号和输出信号。
负载modaldata次要情节(2,1,1)情节(Xburst)标题(输入信号的) subplot(2,1,2) plot(Yburst) title(的输出信号)
计算频响函数。指定一个矩形窗口,其长度等于爆发周期,并且相邻段之间没有重叠。
burstLen = 12000;润扬悬索桥[f] = modalfrf (Xburst Yburst, fs, burstLen);
可视化稳定图表并返回稳定的固有频率。指定最多30种模式的模型顺序。
图modalsd(润扬悬索桥,f, f,'maxmodes', 30);
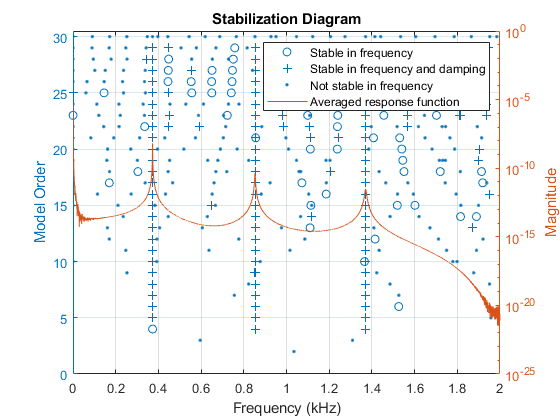
放大图。平均响应函数在373Hz,852 Hz和1371 Hz处具有最大值,其对应于系统的物理频率。将最大值保存到变量。
PHFR = [373 852 1371];
使用最小二乘性复杂指数(LSCE)算法计算模拟模态参数。指定6个模式的型号顺序,并指定从稳定图确定的3模式的物理频率。该功能为每个输入参考产生一组自然频率和阻尼比率。
[fn,博士,女士,ofrf] = modalfit(润扬悬索桥,f, f 6“PhysFreq”,phfr);
绘制重建的频响函数,并将它们与原始的频响函数进行比较。
为了k = 1:2为了m = 1:3次要情节(2 3 m + 3 * (k - 1))的阴谋(f / 1000, 10 * log10 (abs(润扬悬索桥(:,m, k))))在情节(f / 1000, 10 * log10 (abs (ofrf (:, m, k))))从文本(-50 [['输出 ';' 输入 'num2str([m k]')) ylim([-100 -40])结束结束子图(2,3,2)标题(的频率特性函数)

输入参数
输出参数
算法
参考文献
兰德尔·J·阿勒芒和大卫·l·布朗。实验模态分析和动态分量综合,第三卷:模态参数估计。技术报告afwal - tr - 87 - 3069。空军赖特航空实验室,赖特-帕特森空军基地,OH, 1987年12月。
[2]布兰德,安德斯。噪声和振动分析:信号分析和实验程序.英国奇切斯特:John Wiley & Sons, 2011。
Ozdemir, Ahmet Arda和Suat Gumussoy。“基于向量拟合的系统辨识工具箱中的传递函数估计”。国际自动控制联合会第20届世界大会论文集2017年7月,法国图卢兹。
也可以看看
modalfrf|莫奈德|tfestimate|n4sid(系统辨识工具箱)|特遣部队(系统辨识工具箱)
主题
- 识别模型的模态分析
- 系统识别的概述(系统辨识工具箱)
- 系统识别工作流(系统辨识工具箱)
- 金宝app支持连续和离散时间模型(系统辨识工具箱)
你也可以从以下列表中选择一个网站:
