将FBX模型从Paint 3D导入虚拟世界
此示例显示了在Microsoft中创建三维模型原型的工作流™'s绘制3D并在Simulink®3D动画中使用它们™ 编辑器和查看器。本示例假定您在Microsoft Windows平台上工作。金宝app
该示例使用了UAV竞争示例模型的变体,其模拟显示在3D动画查看器中。

使用Paint 3D创建三维模型
在本例中,我们将修改虚拟世界以添加从Paint 3D导出的不同无人机。
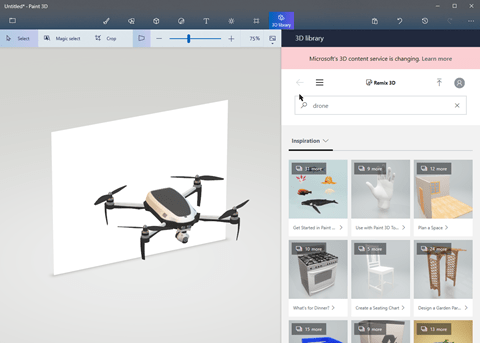
在Paint 3D中,可以使用中的形状和对象创建自己的模型三维形状然而,这个例子使用了微软的Remix3D存储库中的一个无人机。
创建您自己的模型或导入到油漆3D画布。要导入模型,请选择3 d库从Paint 3D toolstrip查看Microsoft和用户为Remix 3D存储库提供的模型。
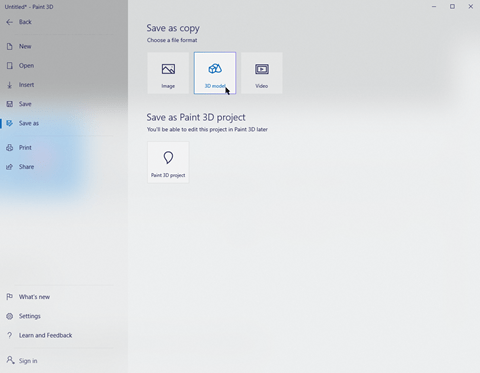
准备好导出模型后,通过选择打开“绘制三维”菜单菜单在工具栏中,选择另存为.选择三维模型选项另存为副本部分在窗户里另存为对话框中,选择FBX作为模型所需的文件类型。
将FBX模型导入虚拟世界
这个无人机fbx进口使用附加的无人机\场景\无人机\示例.wrl定义虚拟世界结构的世界文件。在三维世界编辑器中打开虚拟世界文件。
选择节点>进口自>FBX文件将保存的3D模型导入到节点树中,作为无人机坐标转换(转换)节点。
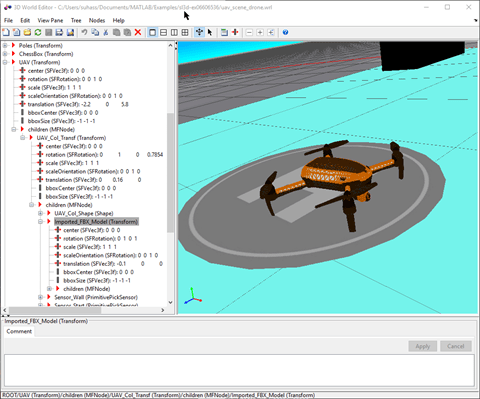
要在虚拟世界中快速查找插入的实体,请右键单击新插入节点的名称并选择视图节点.
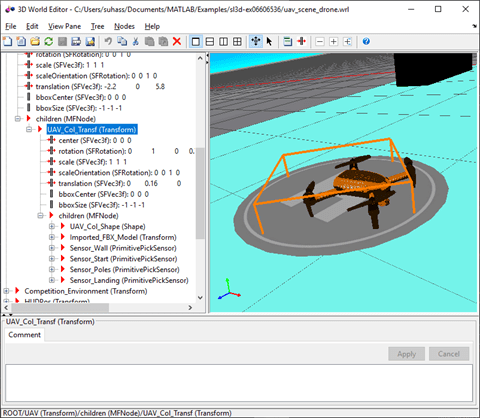
您可能会发现导入的节点位置或大小不正确。更新翻译,旋转和规模导入节点的属性,以将无人机放置在起始垫上,并位于由定义的碰撞框的边界内无人机外形. 保存修改后的虚拟世界。
使用导入模型进行显示仿真
打开无人机fbx进口并添加一个新的VR接收器块。配置块设置以使用包含的无人机\场景\世界\示例.wrl虚拟世界。选择旋转和翻译特性导入的_FBX_模型和节点。
将UAV导航和跟踪模块的输出连接到标有无人机旋转和无人机翻译.这个无人机(变换)节点是虚拟世界节点层次结构中导入模型的直接祖先。因此,旋转和平移操作应用于无人机节点,影响边界框无人机外形,无人机模型导入的_FBX_模型,以及检测无人机碰撞和着陆的原始拾取传感器。
使用预定义的轨迹模拟模型,或通过切换SpaceMouse/预定义的导航开关块,使用SpaceMouse手动模拟模型。

另见
使用许可从微软。
版权归MathWorks公司所有。
您还可以从以下列表中选择网站: