用控制系统调谐器控制线性电动执行器
此示例显示如何使用控制系统调谐器应用程序来调整具有饱和限制的线性电动执行器中的电流和速度回路。
直线电动执行器模型
打开Simulin金宝appk®线性电动执行器模型:
开放式系统(“rct_linact”)

电气和机械部件使用Simulink和Simscape electrical建模。金宝app控制系统由两个级联反馈回路控制直流电机的驱动电流和角速度。
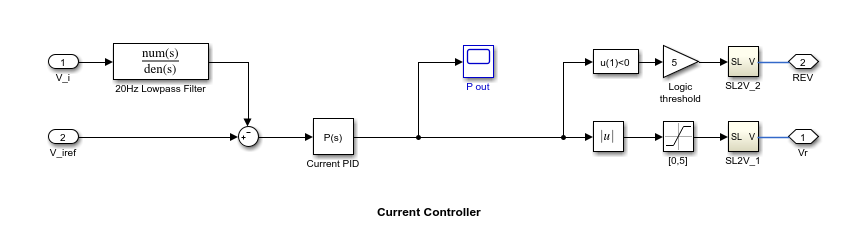
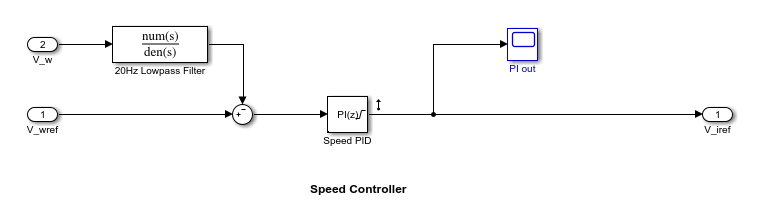
图1:电流和速度控制器。
注意,内环(电流)控制器是比例增益,而外环(速度)控制器具有比例和积分动作。两个控制器的输出限制在+ / - 5。
设计规范
我们需要调整比例和积分增益,以响应2000转转速的需求,在大约0.1秒内,最小超调。模型中初始增益设置为P=50, PI(s)=0.2+0.1/s,对应响应如图2所示。这种响应太慢,对负载干扰太敏感。

图2:未调优响应。
控制系统优化
您可以使用控制系统调谐器联合调整两个反馈回路。首先,从应用程序选项卡打开控制系统调谐器。
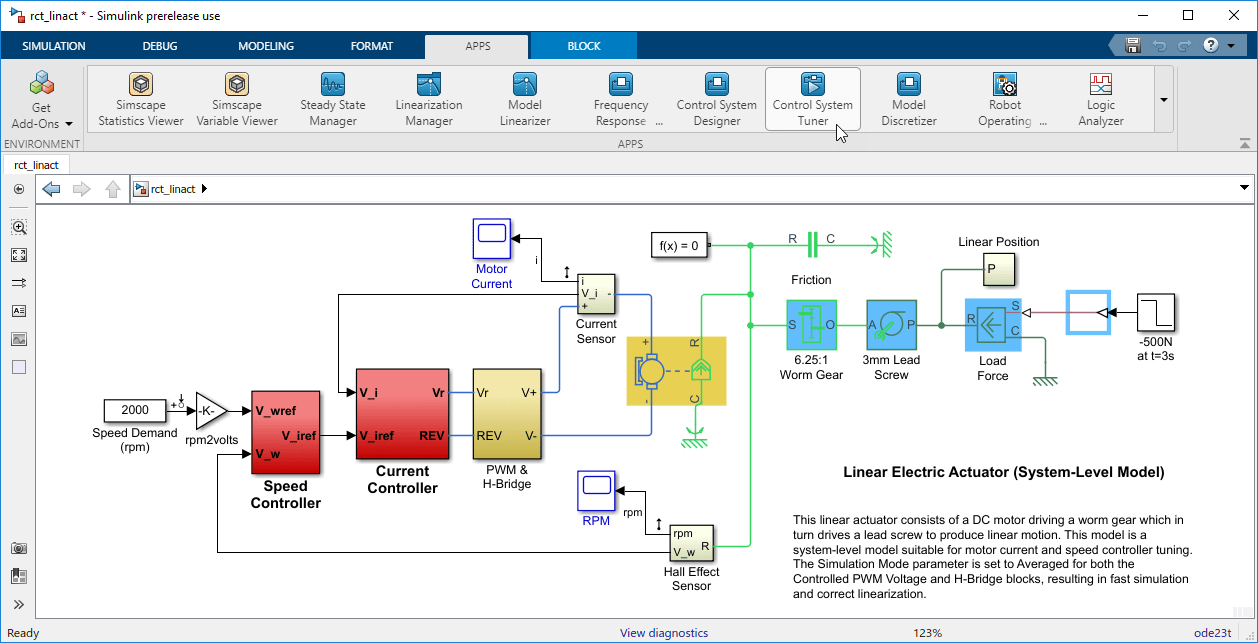
图3:打开控制系统调谐器。
这将打开控制系统调谐器。

图4:控制系统调谐器。
在t=0.5时将模型线性化,以避免在t=0时某些导数出现不连续。您可以将操作点设置在线性化在。。。.
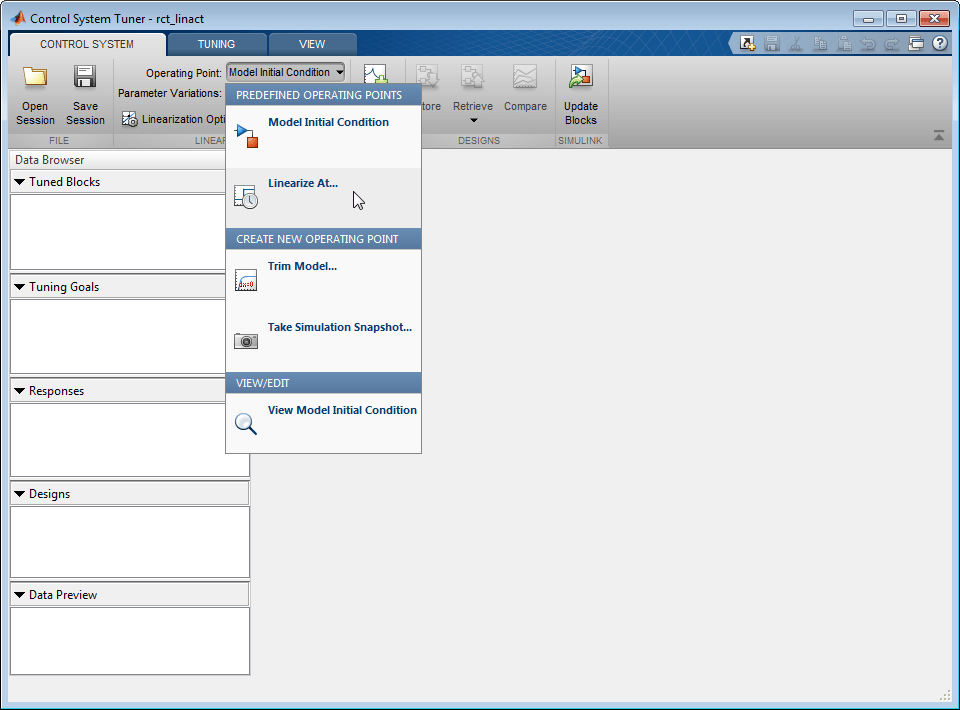
图5:为线性化设置工作点。
将线性化快照时间设置为t=0.5。
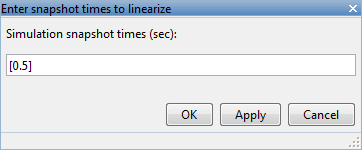
图6:设置线性化快照时间。
为了设置控制系统的调谐块,打开选择模块从…起调优选项卡。
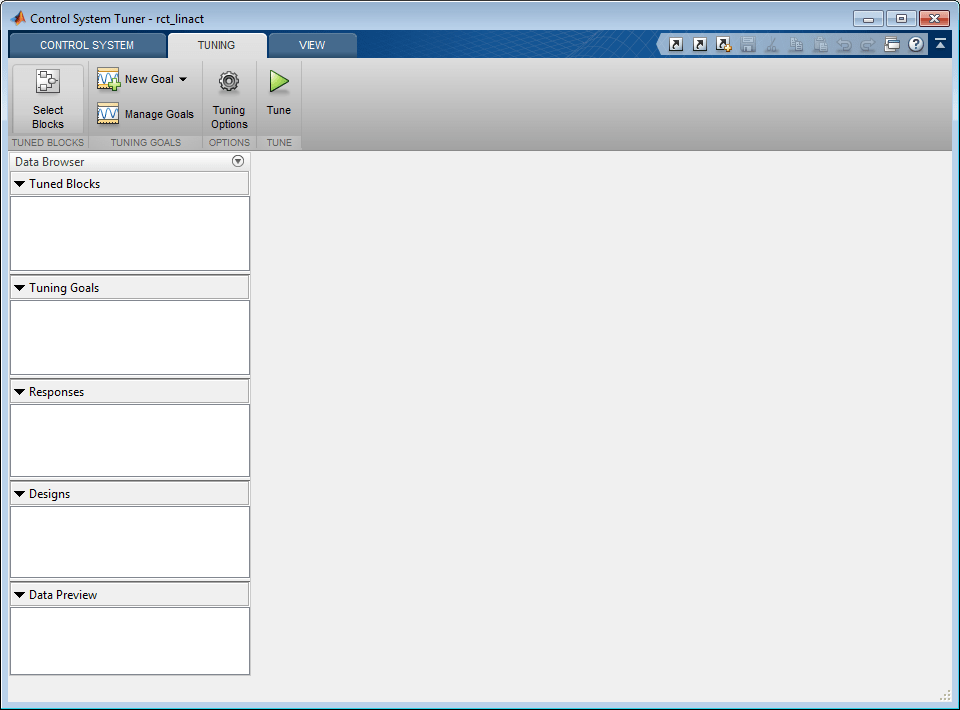
图7:控制系统调谐器的调谐选项卡。
这将在您可以的地方显示调优块的编辑器添加模块.
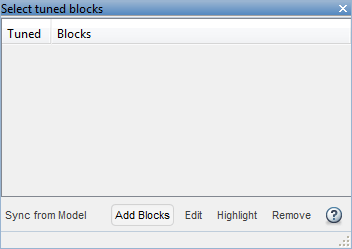
图8:调优块的编辑器。
设置调优的块电流PID和速度PID通过左侧的树导航。
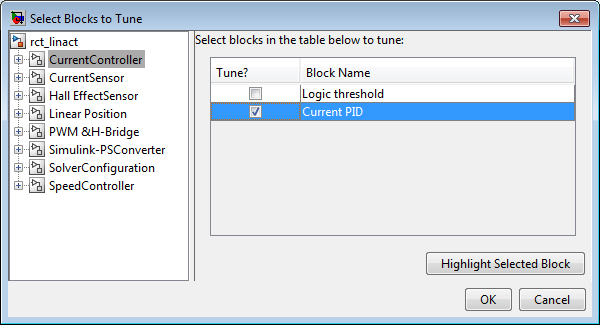
图9:选择调谐块电流PID.
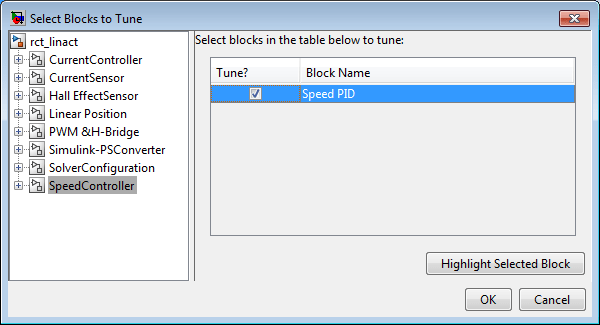
图10:选择调谐块速度PID.
选择调整块电流PID和速度PID在编辑器中显示调谐块。

图11:编辑器用选定的调优块更新。
它们也出现在调整块控制系统调谐器左侧的数据浏览器部分。
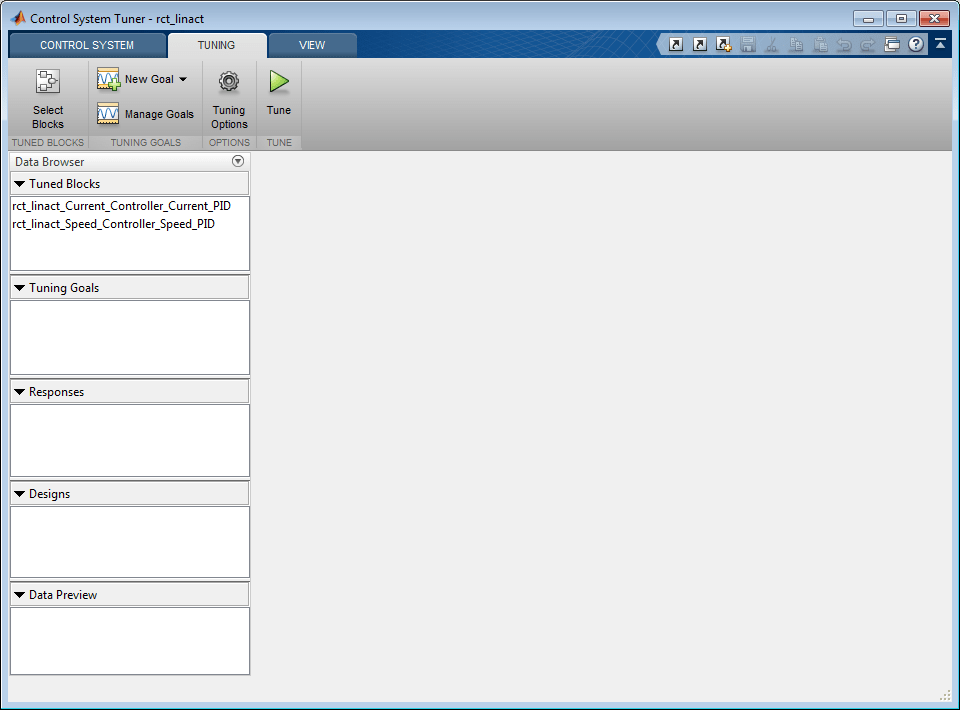
图12:在控制系统调谐器中更新的调谐块。
接下来,指定直流电机应在0.1秒内达到2000 rpm速度要求的跟踪目标。请参阅下的不同类型的目标新目标并选择参考跟踪.
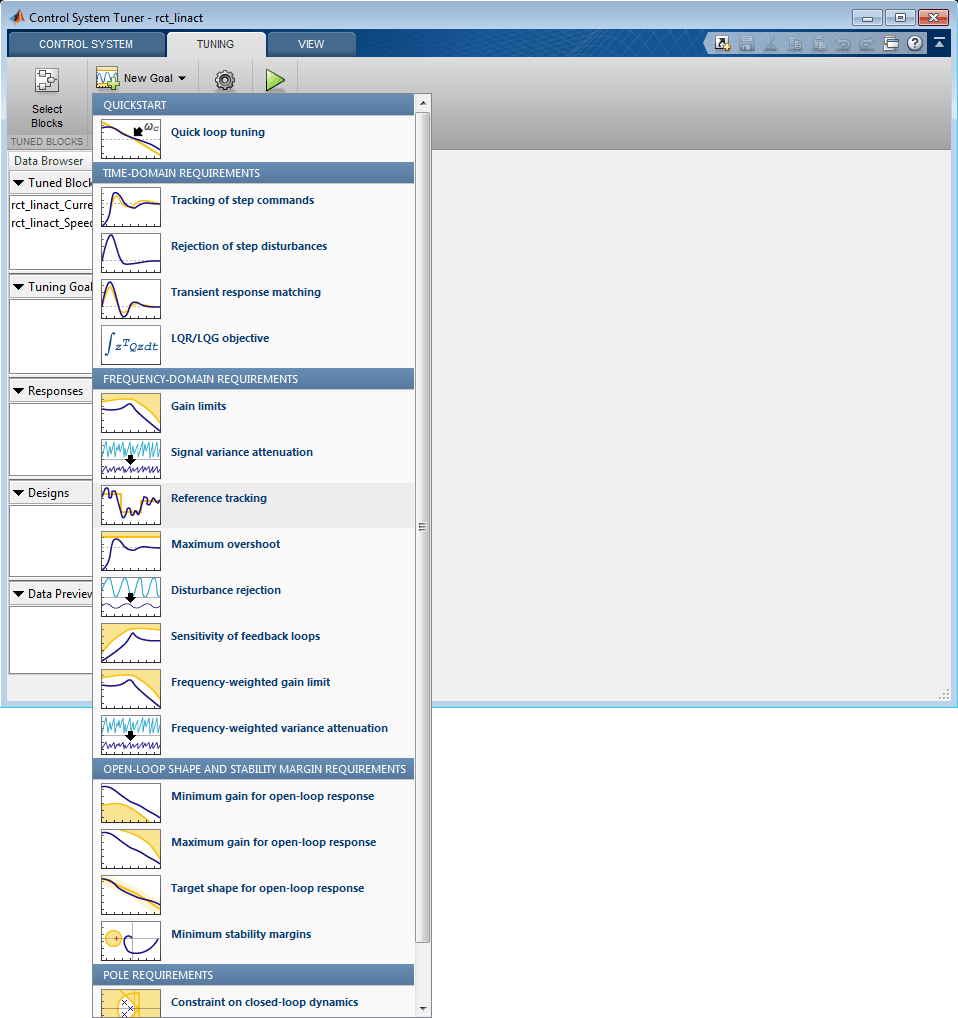
图13:控制系统调谐器中可供选择的目标。
将跟踪目标命名为TR,从参考输入中指定跟踪目标rct_linact (rpm) / 1 /速度的需求到参考跟踪输出rct_linact/霍尔效应传感器/1[rpm]响应时间为0.1秒。
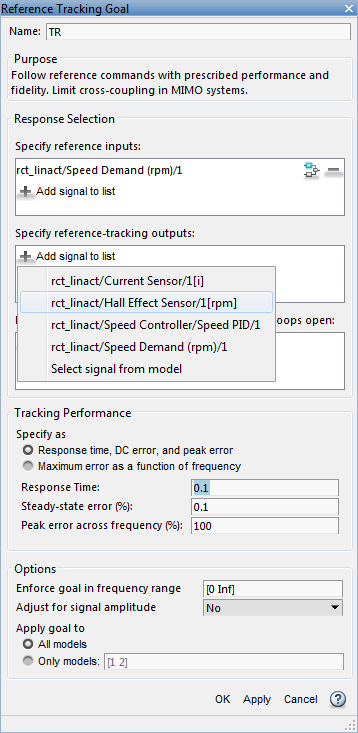
图14:控制系统调谐器中的参考跟踪对话框。
指定跟踪目标的绘图显示在控制系统调谐器和调优目标更新左侧数据浏览器的部分。

图15:跟踪控制系统调谐器中的调谐目标。
您现在可以通过单击控制系统调谐器来调整比例和积分增益调优按钮。跟踪目标的绘图已更新
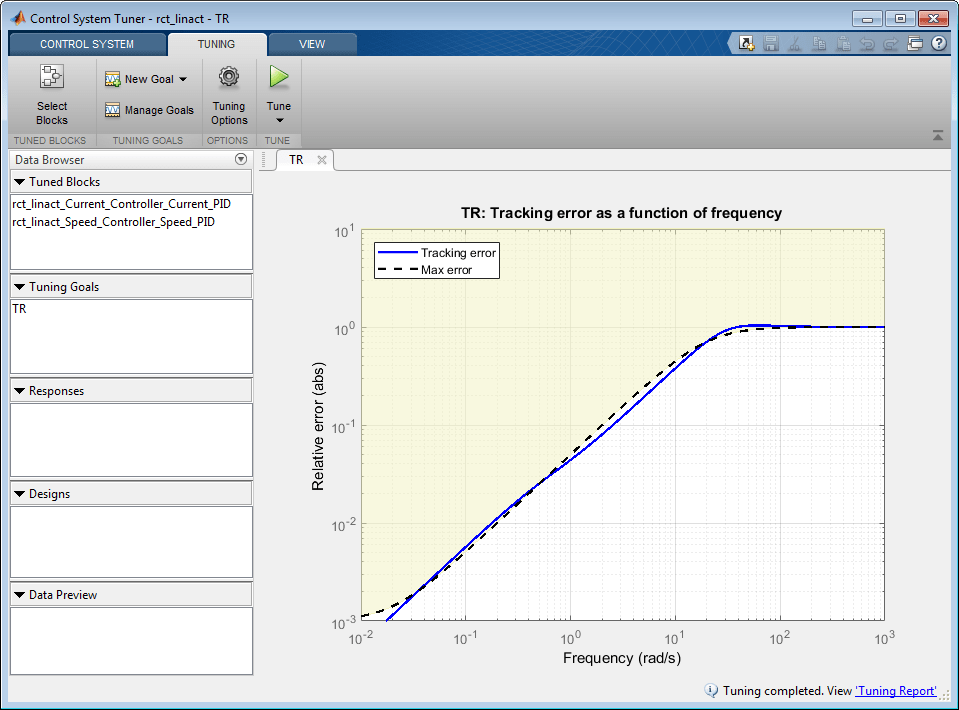
图16:控制系统调谐器中带有调谐块的更新跟踪目标图。
调谐块用调谐增益值更新。为验证此设计,绘制从速度需求到速度的闭环响应新图属于控制系统标签。

图17:控制系统调谐器中的新绘图。
通过step plot对话框指定从速度需求到速度的闭环响应。

图18:控制系统调谐器中的步骤情节对话框。
您可以在控制系统调谐器中看到响应的步骤图。

图19:控制系统调谐器中的步骤图。
响应在线性域中看起来很好,所以首先通过单击存储当前的设计商店并通过单击将调整后的增益值推送到Simulink金宝app更新模块并进一步验证了非线性模型中的设计。

图20:控制系统调谐器中调谐块的存储值。
非线性模拟结果如图21所示。非线性行为远不如线性近似,这种差异可以追溯到内环中的饱和(见图22)。

图21调谐控制器的非线性仿真。

图22:电流控制器输出(限于正负5)。
防止饱和度
到目前为止,我们只指定了外部(速度)循环的期望响应时间。这使得systune自由地在内部和外部循环之间分配控制工作。内环中的饱和表明比例增益太高,需要进行一些再平衡。一种可能的补救措施是明确限制从速度指令到P和PI控制器输出的增益。对于2000 rpm的速度参考和正负5的饱和极限,平均增益不应超过5/2000=0.0025。为了保守起见,我们可以尝试将从速度参考到控制器输出的增益保持在0.001以下。为此,添加两个增益要求,并在所有三个要求都到位的情况下重新调整控制器增益。
通过在“调整”选项卡中指定两个新目标,限制从速度需求到控制信号的增益,以避免饱和。您需要从Simulink模型中选择控制信号,因为它们之前没有定义。金宝app
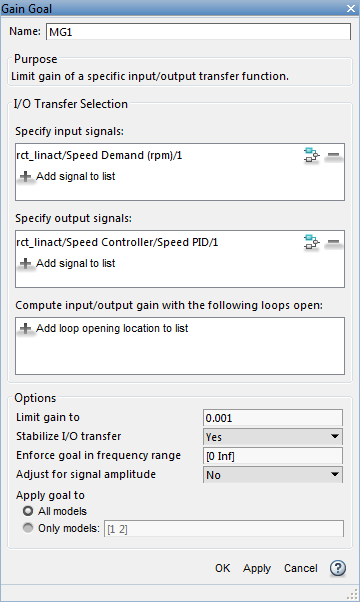
图23:从速度需求到速度PID控制信号的增益目标对话框。
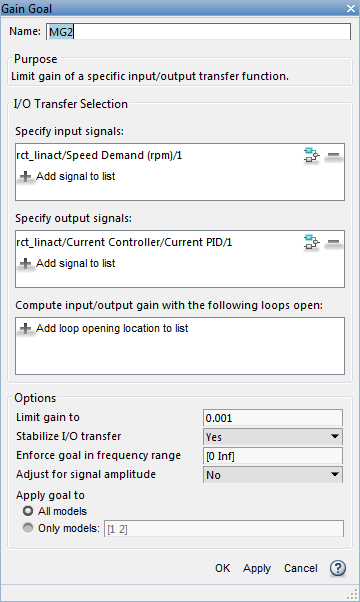
图24:从速度需求到电流PID控制信号的增益目标对话框。
新的增益目标出现在控制系统调谐器的调谐目标部分。

图25:添加到控制系统调谐器的两个增益目标。
重新调整这些额外的要求。在工具的右下角访问的调优报告显示了最差的增益1.39,这表明需求几乎得到了满足,但并没有完全满足(当最终增益小于1时,所有需求都得到了满足)。
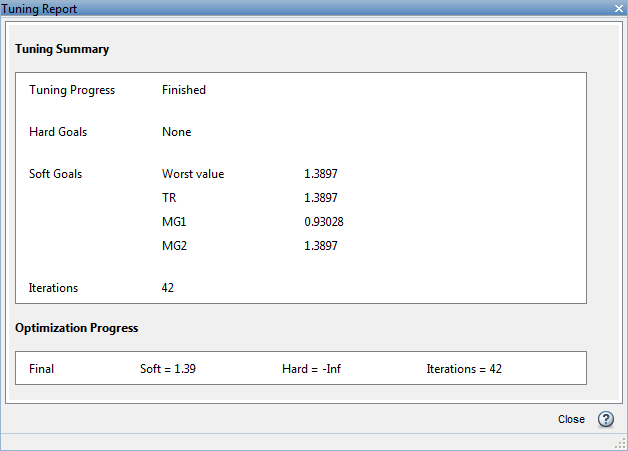
图26:返回后的调优报告。
接下来,单击以比较线性域中的两种设计比较在控制系统选项卡。

图27:比较两种设计。
第二种设计没有那么激进,但仍然满足响应时间要求。

图28:两种设计的阶跃响应。
最后,通过以下方式将新的调谐增益值推送到Simulink模型:金宝app更新模块并模拟对2000 rpm转速需求和500 N负载扰动的响应。模拟结果如图29所示,电流控制器输出如图30所示。

图29:增益约束下调谐的非线性响应。
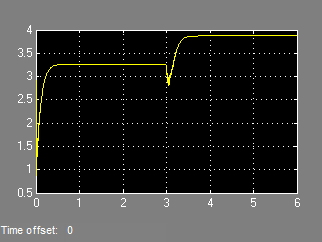
图30:电流控制器输出。
非线性响应现在是令人满意的,电流回路不再饱和。额外的增益约束已强制systune在内外回路之间重新分配控制力,以避免饱和。
另请参阅
相关话题
您还可以从以下列表中选择网站: