指定PI-D和I-PD控制器
PI-D和I-PD控制器用于减轻参考信号变化对控制信号的影响。这些控制器是2DOF PID控制器的变体。
并联型二自由度PID控制器的一般公式为:
在这里,R和Y分别是参考输入和测量输出。U是控制器输出,也称为控制信号.P,我,和D分别指定比例、积分和微分增益。N指定导数过滤器系数。B和C分别为比例分量和微分分量指定设定点权重。对于单自由度PID控制器,B和C等于1。
如果R如果是非光滑或不连续的,则导数和比例分量可能会产生较大的峰值或偏移U,这可能是不可行的。例如,一个阶跃输入可以导致一个大的峰值U因为衍生成分。对于电机执行器而言,这种强烈的控制信号可能会损坏电机。
减轻…的影响R在U,套B或C,或两者都设置为0。使用以下基于权重的设置点形式之一:
圆周率(B= 1和C= 0)-衍生成分不会直接传播R到U,而比例分量。但是,具有更大影响的衍生组件被抑制。也称为输出控制器的导数.
此控制器形式的一般公式为:
I-PD公司(B= 0和C= 0)比例和微分分量不会直接传播R到U.
此控制器形式的一般公式为:
下图显示U对于不同的PID形式的步骤参考。当参考值从0变为1时,1DOF-PID控制器产生较大的尖峰,PI-D形式产生较小的跳跃。相比之下,I-PD形式对环境变化的反应没有那么大R.

你可以调音P,我,D,和NPI-D或I-PD控制器的系数,以实现期望的干扰抑制和参考跟踪。
使用PID控制器(2DOF)块指定PI-D和I-PD控制器
使用PID控制器(2DOF)或离散PID控制器(2DOF)块,打开“块”对话框。在控制器菜单,选择PID.
对于PI-D控制器,输入
1.在设定值权重(b)盒子,和0在设定值重量(c)盒子。对于I-PD控制器,输入
0在设定值权重(b)盒子,和0在设定值重量(c)盒子。
对于演示PI-D和I-PD控制器形式的示例,键入ex\ scd\ pid2dof\设定值\基于\的\控制器. 这打开了一个模型,比较了一个1自由度PID、一个PI-D和一个I-PD控制器的性能。
PI-D和I-PD控制器的自动整定
你可以用PID调谐器自动调整PI-D和I-PD控制器,同时保持固定的B和C价值观。为此:
在模型中,打开块。在“块”对话框的控制器菜单,选择
PID.点击调子.PID调谐器打开。
在PID调谐器,在类型菜单,选择
PI-DF型或I-PDF格式.PID调谐器重新调整控制器增益,修正B=1和C=0表示PI-D,以及B=0和C=0表示I-PD。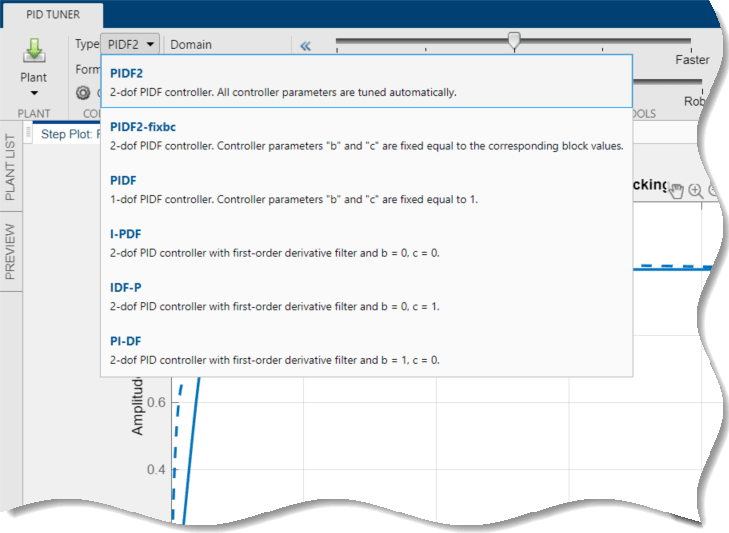

现在,您可以分析系统响应,如中所述PID调谐器的设计分析.
另请参见
相关主题
也可以从以下列表中选择网站: