主要内容
二自由度PID控制器的设计
使用PID调谐器,你可以调整两个自由度PID控制器(2自由度)和2自由度离散PID控制器块来实现良好的设定值跟踪和良好的抗干扰。
关于二自由度PID控制器
一种二自由度PID补偿器,通常称为ISA-PID补偿器,相当于前馈补偿器和反馈补偿器,如下图所示。

前馈补偿器为PD,反馈补偿器为PID。在PID控制器(2自由度)和2自由度离散PID控制器块,设置点权重b和c确定前馈补偿器中比例和微分作用的强度。有关更多信息,请参见PID控制器(2自由度)和2自由度离散PID控制器块引用页面。
二自由度PID控制器的整定
PID调谐器调节PID增益P,我,D,N.为PID控制器(2自由度)块,调谐器也会自动调整设定值权重b和c.您可以使用相同的技术来改进和分析用于调整单自由度PID控制器的设计。
在Simulink中调整一个二自由度PID控制器块金宝app®模型:
双击。在“块参数”对话框中,单击调优.
PID调谐器在模型初始条件下打开、线性化模型,并自动计算平衡性能和鲁棒性的初始控制器设计。在这个设计中,PID调谐器调整设定值权重
b和c以及PID增益。要查看所有系数的调优值,请单击 显示参数.
显示参数.
如中所述,分析并优化初始设计分析PID调谐器的设计.所有相同的响应图,设计调整,和选项可用于调整2-DOF PID控制器在单自由度的情况下。
验证控制器设计,如所述在Simulink模型中验证PID设计金宝app.

固定重量控制器类型
当你调出PID控制器(2自由度)阻挡PID调谐器,类型菜单显示指定控制器类型的附加选项。这些选项包括具有固定权重的控制器,如中描述的控制器指定PI-D和I-PD控制器.
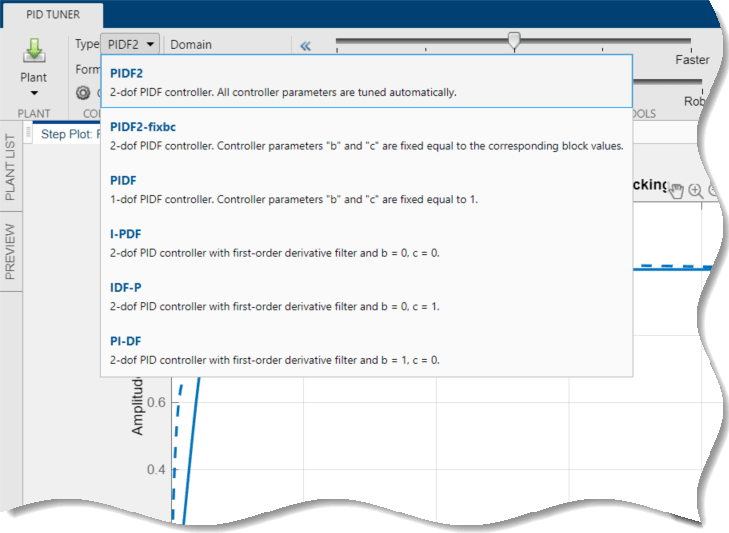
某些类型选项的可用性取决于控制器设置在PID控制器(2自由度)块对话框。
| 类型 | 描述 | 控制器设置在块 |
|---|---|---|
PIDF2 |
带微分项滤波器的二自由度PID控制器。PID调谐器调优所有控制器参数,包括设定点权重。 | PID |
PIDF2-fixbc |
带微分项滤波器的二自由度PID控制器。PID调谐器按控制器块中指定的值修复设定值权重。 | PID |
PIDF |
带有动作的二自由度控制器相当于一个带有固定动作的一自由度PIDF控制器b = 1和c = 1. |
PID |
I-PDF |
2-DOF PID控制器带有微分项滤波器,具有固定b = 0和c = 0. |
PID |
IDF-P |
2-DOF PID控制器带有微分项滤波器,具有固定b = 0和c = 1. |
PID |
PI-DF |
2-DOF PID控制器带有微分项滤波器,具有固定b = 1和c = 0. |
PID |
皮 |
二自由度PI控制器。PID调谐器调整所有控制器参数,包括比例项的设定值权重,b. |
圆周率 |
PI2-fixbc |
带微分项滤波器的二自由度PI控制器。PID调谐器修复选点重量b在控制器块中指定的值。 |
圆周率 |
圆周率 |
2自由度控制器,动作相当于1自由度PI控制器,具有固定b = 1. |
圆周率 |
PDF2 |
带微分项滤波器的二自由度PD控制器(无积分器)。PID调谐器调优所有控制器参数,包括设定点权重。 | PD |
PDF2-fixbc |
带导数项滤波器的2自由度PD控制器。PID调谐器按控制器块中指定的值修复设定值权重。 | PD |
PD |
具有动作的二自由度控制器相当于具有固定动作的一自由度PD控制器b = 1和c = 1. |
PD |
相关话题
你也可以从以下列表中选择一个网站: