operspec
操作点规范
描述
例子
创建操作点规范对象
打开Sim金宝appulink模型。
系统=“watertank”;开放式系统(sys)
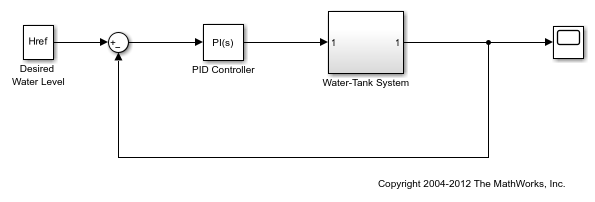
为模型创建默认的工作点规范对象。
操作规范=操作规范(系统)
型号水箱的操作点规范。(time - varying Components evaluate at time t=0) States: ---------- (1.) watertank/PID Controller/Integrator/Continuous/Integrator spec: dx =0, initial guess: 0 (2.) watertank/ watertank System/H spec: dx =0, initial guess: 1 Inputs: None ---------- Outputs: None ----------
操作规范包含模型中两种状态的规范。由于模型没有根级别的导入或输出,操作规范不包含输入或输出规范。要添加输出规范,请使用addoutputspec.
使用点符号修改每个状态的工作点规格。例如,将第一个状态配置为:
处于稳定状态。
下界
0.初始值是
2.用于修剪。
操作规范状态(1)。稳定状态=1;操作规范状态(1)。x=2;操作规范状态(1)。最小值=0;
复制一个操作点规范
您可以创建新的operspec变量有三种方式:
使用
operspec命令使用等号赋值(
=)接线员使用
复制命令
使用=运算符生成的链接变量都指向相同的基础数据复制命令生成一个独立的operspec在本例中,创建operspec对象的两种方式,并检查他们的行为。
mdl =“watertank”;开放式系统(mdl);opspec1=operspec(mdl)
型号水箱的操作点规范。(time - varying Components evaluate at time t=0) States: ---------- (1.) watertank/PID Controller/Integrator/Continuous/Integrator spec: dx =0, initial guess: 0 (2.) watertank/ watertank System/H spec: dx =0, initial guess: 1 Inputs: None ---------- Outputs: None ----------
使用带有的赋值创建新的操作点规范对象=操作人员
opspec2=opspec1;
opspec2是一个operspec对象,该对象指向与opspec1。由于此链接,您无法单独更改这两个的属性operspec对象。若要查看此信息,请更改的属性opspec2.例如,将第一个状态的初始值从0更改为2。变化表现在州显示的一部分。
opspec2.States(1)。x = 2
型号水箱的操作点规范。(time - varying Components evaluate at time t=0) States: ---------- (1.) watertank/PID Controller/Integrator/Continuous/Integrator spec: dx =0, initial guess: 2 (2.) watertank/ watertank System/H spec: dx =0, initial guess: 1 Inputs: None ---------- Outputs: None ----------
检查opspec1要查看相应的属性值opspec1也会从0更改为2。
opspec1
型号水箱的操作点规范。(time - varying Components evaluate at time t=0) States: ---------- (1.) watertank/PID Controller/Integrator/Continuous/Integrator spec: dx =0, initial guess: 2 (2.) watertank/ watertank System/H spec: dx =0, initial guess: 1 Inputs: None ---------- Outputs: None ----------
要创建操作点规范的独立副本,请使用复制命令。
opspec3=副本(opspec1);
现在,当你改变opspec3,opspec1不会改变。例如,将第一个状态的初始值从2更改为4。
opspec3.状态(1).x=4
模型水箱的工作点规范。(在时间t=0时评估的时变组件)状态:-------------(1)水箱/PID控制器/积分器/连续/积分器规范:dx=0,初始猜测:4(2)水箱/水箱系统/H规范:dx=0,初始猜测:1输入:无-----------输出:无----------
在里面opspec1,相应的值保持为2。
opspec1.States(1.x)
ans = 2
发生此复制行为是因为operspec是一个句柄对象.有关句柄对象的更多信息,请参见处理对象的行为.
创建操作点规范对象数组
打开Sim金宝appulink模型。
系统=“watertank”;开放式系统(sys)

创建一个操作点规范对象的2 × 3数组。您可以使用这些数组在多个操作点批处理修剪模型。
opspec = operspec (sys,[2、3]);
每个元素操作规范包含模型的默认操作点规范对象。
使用点表示法修改操作点规范对象。例如,在第行中配置规范对象的第二个状态1.柱3..
opspec(1、3).States(2)。稳态= 1;opspec(1、3).States(1)。x = 2;
您还可以创建操作点规范对象的多维数组。例如,创建一个3 × 4 × 5的数组。
opspec=operspec(系统[3,4,5]);
输入参数
输出参数
提示
另见
您还可以从以下列表中选择网站: