查找
稳态工作点从规格(微调)或模拟
语法
描述
op.= findop (MDL.,Tsnapshot.)Tsnapshot..
op.= findop (MDL.,Tsnapshot.,帕纳)
例子
修剪模型满足状态规格
打开Simulin金宝appk模型。
mdl ='水箱';Open_System(MDL)
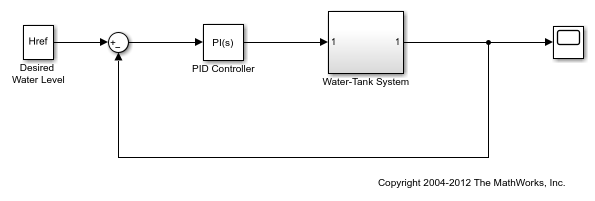
修剪模型以找到水箱水平的稳态工作点10..
创建默认操作点规范对象。
opspec = operspec (mdl);
为第一个模型状态配置规范。第一个状态必须是具有下界的稳态0.提供一个初步的猜测2对于国家价值。
opspec.States(1)。稳态= 1;opspec.States(1)。x = 2;opspec.States(1)。最小值= 0;
将第二个模型状态配置为一个值为的已知状态10..
opspec.states(2).known = 1;opspec.states(2).x = 10;
找到满足这些规范的操作点。
op = condop(mdl,opspec);
作业点搜索报告:---------------------------------型号水箱作业点搜索报告。(t=0时时变组件评估)工作点规范成功满足。状态:----------(1.)水箱/PID控制器/积分器/连续/积分器x: 1.26 dx: 0(0)(2.)水箱/水箱系统/H x: 10 dx: 0(0)输入:无----------输出:无----------
用于参数变化的批量修剪金宝app模拟模型
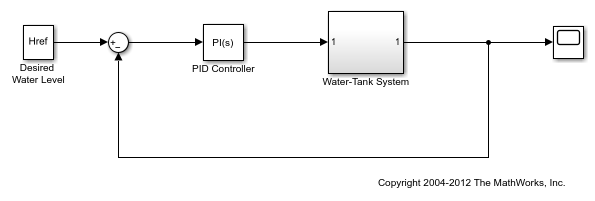
打开Simulin金宝appk模型。
mdl ='水箱';Open_System(MDL)

改变参数一个和b在其标称值的10%以内,并创建一个3×4参数网格。
[A_grid, b_grid] = ndgrid (linspace (0.9 * 1.1 * 3),......Linspace(0.9 * B,1.1 * B,4));
创建一个参数结构阵列,指定每个参数的名称和网格点。
Params(1).name ='一种';params(1).value = a_grid;Params(2).name ='B';params(2).value = b_grid;
为模型创建默认的操作点规范。
opspec = operspec (mdl);
使用指定的操作点规范和参数网格修剪模型。
opt = findopoptions(“DisplayReport”,'离开');op = findop (mdl、opspec params,选择);
op.是一个3×4阵列的操作点对象,对应于指定的参数网格点。
使用指定的优化器类型修剪模型
打开Simulin金宝appk模型。
mdl ='水箱';Open_System(MDL)

创建默认的操作点规范对象。
opspec = operspec (mdl);
创建一个选项集,将优化程序类型设置为渐变下降并抑制搜索报告显示。
opt = findopoptions('Optimizertype','毕恭牙',“DisplayReport”,'离开');
使用指定的选项集修剪模型。
OP = SINDOP(MDL,OPSPEC,OPT);
获取操作点搜索报告
打开Simulin金宝appk模型。
mdl ='水箱';Open_System(MDL)
创建默认操作点规范对象。
opspec = operspec (mdl);
为第一个模型状态配置规范。
opspec.States(1)。稳态= 1;opspec.States(1)。x = 2;opspec.States(1)。最小值= 0;
为第二个模型状态配置规范。
opspec.states(2).known = 1;opspec.states(2).x = 10;
找到满足这些规范的操作点,并返回操作点搜索报告。创建一个选项设置以禁止搜索报告显示。
opt = findopoptions(“DisplayReport”、假);[op, opreport] = findop (mdl opspec,选择);
opreport.描述优化算法在操作点搜索结束时满足规范的程度。
opreport.
Model Watertank的操作点搜索报告。(t=0时时变组件评估)工作点规范成功满足。状态:----------(1.)水箱/PID控制器/积分器/连续/积分器x: 1.26 dx: 0(0)(2.)水箱/水箱系统/H x: 10 dx: 0(0)输入:无----------输出:无----------
dx是每个州的时间衍生。既然dx值为零时,工作点处于稳态。
在模拟快照中提取操作点
打开Simulin金宝appk模型。
mdl =“magball”;Open_System(MDL)

对模型进行仿真,提取操作点10.和20.时间单位。
op = condop(mdl,[10,20]);
op.是操作点的列向量,每个快照时间有一个元素。
显示第一个操作点。
op (1)
模型马球的操作点。(在时间t = 10评估的时变组分)状态:----------(1.)MAMBALL / CONTROLLER / PID控制器/过滤器/续。过滤器/过滤器X:5.47E-07(2.)Magball / Controller / PID控制器/集成器/连续/积分器X:14(3)Magball /磁性球厂/电流X:7(4.)Magball / Magb Ball /磁性球植物/ DHDT X:8.44E-08(5.)Magball /磁性球厂/高度X:0.05输入:无----------
在仿真快照下改变参数和提取操作点
打开仿真软金宝app件模型。
mdl ='水箱';Open_System(MDL)

指定参数值。参数网格是5×4阵列。
[A_grid, b_grid] = ndgrid (linspace (0.9 * 1.1 * 5),......Linspace(0.9 * B,1.1 * B,4));Params(1).name ='一种';params(1).value = a_grid;Params(2).name ='B';params(2).value = b_grid;
模拟模型和提取工作点0,5, 和10.时间单位。
Op = findop(mdl,[0 5 10],params);
查找对每个参数值组合进行模型仿真,并在指定的仿真时间提取运行点。
op.是操作点对象的3 × 5 × 4数组。
尺寸(op)
ans = 3 5 4
输入参数
输出参数
更多关于
提示
您可以使用仿真快照或先前计算的操作点初始化操作点搜索
initopspec.
算法
默认,查找使用优化器毕恭普 - 奥利.要使用不同的优化器,请更改值优化型号在选项使用findopOptions.
查找自动设置这些Simulink模型属性以进行优化:金宝app
bufferreuse ='关'RTWInlineParameters = ' 'blockreductionopt ='关闭'SaveFormat ='structionWithTime'
优化完成后,Simulink还原原始模型属性。金宝app
替代功能
应用程序
作为替代查找命令,您可以通过以下方式之一找到操作点。
使用稳态经理.例如,看到使用稳态管理器从规范计算工作点.
如果您正在计算用于线性化的操作点,则可以使用该操作点找到操作点并使用该模型线性化模型线性化器.例如,看到使用模型线性化器计算从规范的操作点.
您还可以从以下列表中选择一个网站: