使用模型线性化器从规格计算工作点
你可以计算Simulink的稳态工作点金宝app®通过指定对模型状态、输出和输入的约束,并找到满足这些约束的模型运行条件,建立模型。有关稳态工作点的更多信息,请参阅操作点和计算稳态工作点.
要为您的Simulink模型找到一个操作点,您可以使用金宝app模型线性化器,如本例所示。
或者,您可以修剪您的模型:
在稳态经理.有关更多信息,请参见使用稳态管理器从规格中计算工作点.
在命令行。有关详细信息,请参阅根据命令行上的规范计算操作点.
在本例中,您计算一个工作点以满足状态规范。使用类似的方法,您可以定义输出或输入规范。此外,您还可以定义状态、输出和输入规范的组合;也就是说,您不必使用,例如,仅仅使用状态规范。
有关修剪模型以符合规格的详细信息,请参见根据规范计算稳态工作点.
开放模型线性化器
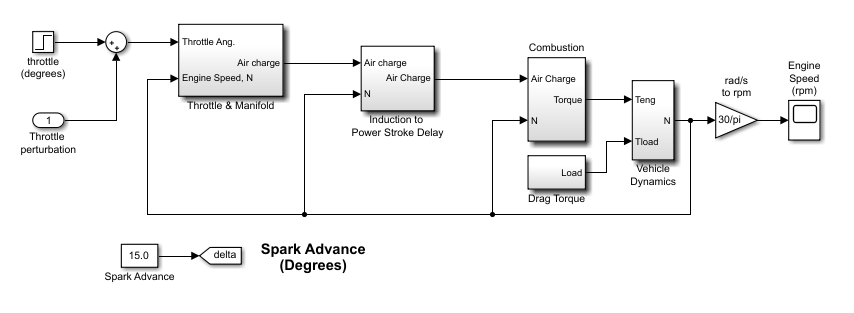
打开Simulin金宝appk模型。
sys =“scdspeed”; 开放式系统(sys)
打开模型线性化器,在Simulin金宝appk模型窗口中应用程序画廊,点击模型线性化器.

定义工作点规格
在模型线性化器,在线性分析选项卡,在操作点下拉列表中,选择调整模型.
在“修剪模型”对话框中的规范选项卡,您可以为模型状态、输入和输出定义规范。对于本例,单击州选项卡。
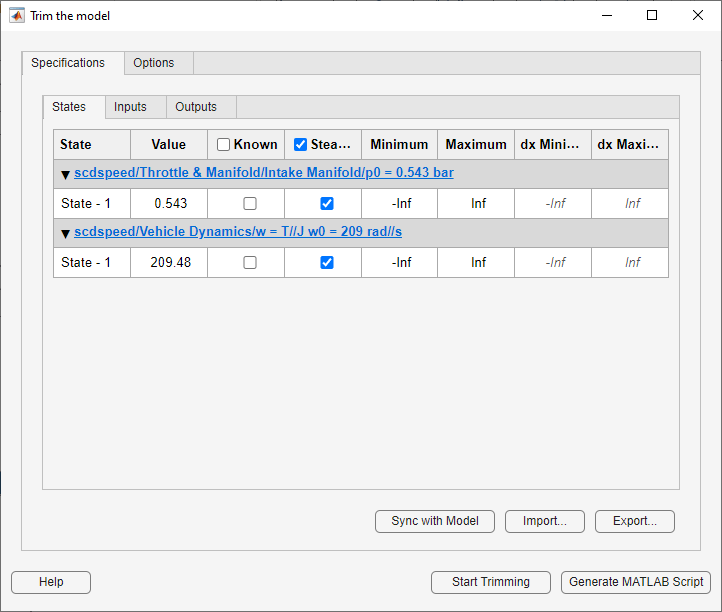
缺省情况下,在州选项卡时,软件指定两种模型状态都处于平衡状态,如图中的复选标记所示稳定状态列。这两种状态也指定为未知值;也就是说,它们的稳态值在修剪期间计算,初始猜测在价值列。
将第二个状态(发动机角速度)更改为已知值已知的列中,选择相应的行,然后在价值列,将值设置为180.

您还可以在调整期间为模型状态指定边界。对于本例,约束第一个状态为between0.5和0.7.将这些值输入最低限度和最大限度分别列。

调整模型
要计算满足这些规范的工作点,请单击开始修剪.
软件使用优化搜索来查找符合您的规范的操作点。

修剪进度查看器显示优化进度以及优化算法已成功终止(最大误差)列显示每次迭代的最大约束冲突。的块列显示约束冲突应用到的块。
调整后的工作点,op_trim1,出现在线性分析工作区.
为了评估所得的工作点值是否符合规范,在线性分析工作区,双击op_trim1.
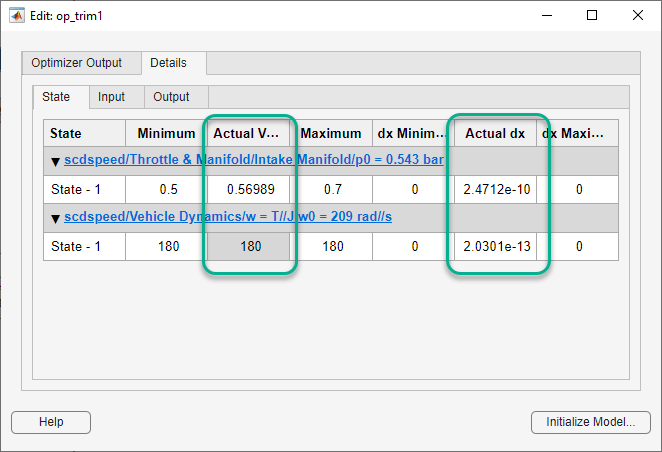
在“编辑”对话框中,在状态选项卡,实际价值因为第一种状态属于期望值边界,实际角速度为180,按规定。
的实际dx列显示操作点状态值的变化率。由于这些值接近于零,状态没有变化,这表明工作点处于稳定状态。
限制国家衍生品
当您调整模型以满足状态规范时,您还可以约束非稳态状态的导数。使用这样的约束,您可以将导数修剪为已知的非零值,或者为不能达到稳定状态的状态指定导数公差。
例如,假设你想要找到发动机角速度为180 rad/s和角加速度为的工作条件50rad /秒2.为此,首先打开“修剪模型”对话框。在模型线性化器,在操作点下拉列表中,选择调整模型.
在稳定状态列中,清除相应行中的选择。然后,在dx最小值和dx最大列,将两个状态导数界限设置为50.

单击,计算工作点开始修剪.
在模型线性化器,在线性分析工作区,双击op_trim2.
在“编辑”对话框的第二行中,实际dx列与想要的dx列。因此,工作点满足指定的状态导数约束。

修剪模型后,您可以:
在产生的操作点上线性化您的模型。有关更多信息,请参见在裁剪工作点线性化.
在结果操作点模拟您的模型。有关更多信息,请参见在特定的工作点上模金宝app拟Simulink模型.
另请参阅
相关话题
您还可以从以下列表中选择网站: